Главная
Тестовые
вопросы по теме "Структурный анализ плоских механизмов"
- Вид анализа механизма, при проведении которого исследуют его состав, называется _____ анализом
1. кинематическим
2. силовым
3. структурным
4. динамическим
5. составным
- Задача структурного анализа пространственных рычажных механизмов – это определение:
1. угловых скоростей
2. приведённой силы
3. линейных ускорений
4. состава структуры
5. положений звеньев
6. маневренности
- Формула Чебышева для расчета плоского механизма имеет вид …
1. ∆W = 3n – (2p5 + p4) + q
2. ∆W = 3n – (2p5 + p4) - q
3. ∆W = 6n – (2p5 + p4) + q
4. ∆W = 6n – (2p5 + p4) – q
- Число избыточных связей «q» для пространственных механизмов определяют формулой…
1. q=6n-(5p5+4p4+3p3+2p2+p1)
2. q=3n-2p5-p4
3. q=W+5p5+4p4+3p3+2p2+p1+6n
4. q=W+5p5+4p4+3p3+2p2+p1-6n
5. q=W+2p5+p4-3n
- Параметрический синтез, … (несколько
правильных ответов)
1. в процессе которого определяется структура
будущего механизма
2. при котором по заданным звеньям и
кинематическим парам механизма находятся размеры звеньев
3. при котором по заданным кинематическим или
динамическим свойствам механизма находятся размеры звеньев
4. связывает число степеней свободы с числом и
видом кинематических пар
5. геометрическое построение планов скоростей
и ускорений
6. представляет собой сложную задачу, которая
обычно имеет многовариантное решение
- Анализ механизма это
1. исследование структурных, кинематических или динамических свойств механизма
2. определение класса механизма
3. определение параметров (перемещений, траекторий, скоростей, ускорений)
4. нахождение кинематический схемы по известным параметрам механизма
- Механизм, по Асуру, состоит из _____ механизмов и последовательно присоединённых структурных групп Ассура
1. первичных
2. однозвенных
3. кривошипных
4. ползунных
- Подвижное звено (вращающееся, качающееся или движущееся возвратно поступательно), которое является направляющей ползуна
1. кулиса
2. кривошип
3. ползун
4. шатун
-Число звеньев n в группе Ассура и число кинематических пар пятого класса p5 связаны соотношением…
1. ![]()
2. ![]()
3. ![]()
4. ![]()
- Степень подвижности структурной группы Ассура равна…
1. 0
2. 2
3. 1
4. 3
5. 5
6. 4
- Группой Ассура является кинематическая цепь …
1. 
2. 
3. 
4. 
- Число степеней свободы плоского рычажного механизма определяются по формуле …
1. Чебышева
2. Малышева - Сомова
3. Озола
4. Новикова
- Формула, применяемая для определения степени подвижности пространственной кинематической цепи …
1. Ассура
2. Жуковского
3. Чебышева
4. Малышева
- Плоский рычажный механизм, структурная формула которого имеет вид I-III - III, - это механизм … класса
1. 3
2. 2
3. 1
4. 5
- Число условий связи при числе степеней свободы звеньев кинематической пары равном 5 (один ответ)
1. 1
2. 6
3. 0
4. 5
- Число условий связи при числе степеней свободы звеньев кинематической пары, равном 1
1. 1
2. 6
3. 0
4. 5
- Максимальное число условий связи
1. 1
2. 6
3. 0
4. 5
- Максимальное число степеней свободы звена кинематической пары в относительном движении
1. 1
2. 6
3. 0
4. 5
- Чему равна степень подвижности группы Ассура?
1. единице
2. нулю
3. двум
4. трем
- Кинематическая цепь является группой Ассура …
![]()
1. 2 класса, 1 порядка
2. 2 класса, 2 порядка
3. 3 класса, 2 порядка
4. 2 класса, 3 порядка
- Кинематическая цепь является группой Ассура …
![]()
1. 2 класса, 1 порядка
2. 2 класса, 2 порядка
3. 3 класса, 2 порядка
4. 2 класса, 3 порядка
- Какого класса считается кинематическая пара, если число наложенных связей S=5 и число степеней свободы W=1?
1. это кинематическая пара 1 класса
2. это кинематическая пара 2 класса
3. это кинематическая пара 4 класса
4. это кинематическая пара 5 класса
- Какого класса считается кинематическая пара, если число наложенных связей S=4 и число степеней свободы W=2?
1. это кинематическая пара 1 класса
2. это кинематическая пара 2 класса
3. это кинематическая пара 4 класса
4. это кинематическая пара 5 класса
- Какого класса считается кинематическая пара, если число наложенных связей S=2, а число степеней свободы W=4?
1. это кинематическая пара 1 класса
2. это кинематическая пара 2 класса
3. это кинематическая пара 3 класса
4. это кинематическая пара 5 класса
- Какого класса считается кинематическая пара, если число наложенных связей S=1, а число степеней свободы W=5?
1. это кинематическая пара 1 класса
2. это кинематическая пара 2 класса
3. это кинематическая пара 3 класса
4. это кинематическая пара 5 класса
- Кинематическая пара, в которой звенья соприкасаются по поверхности …
1. высшая
2. средняя
3. низшая
4. жёсткая
- Кинематическая пара, в которой звенья соприкасаются по линии или в точке
1. высшая
2. средняя
3. низшая
4. жёсткая
- Какая кинематическая пара относится к 5-му классу?
1. сферическая
2. цилиндрическая
3. вращательная
4. винтовая
- Кинематическая пара, допускающая относительное вращательное движение звеньев вокруг оси
1. первого класса
2. вращательная
3. третьего класса
4. поступательная
- Кинематическая пара, допускающая лишь прямолинейное поступательное относительное движение звеньев …
1. первого класса
2. вращательная
3. третьего класса
4. поступательная
- Механизм, звенья которого движутся в параллельных плоскостях называется
1. группа Ассура
2. плоский
3. кинематическая цепь
4. пространственный
- Механизм, звенья которого описывают траектории, лежащие в пересекающихся плоскостях называется
1. группа Ассура
2. плоский
3. кинематическая цепь
4. пространственный
- Укажите правильное утверждение: группа Асура это...
1. кинематическая цепь второго класса, второго порядка
2. кинематическая цепь с нулевой степенью подвижности, не распадающаяся на более простые
3. кинематические цепи с нулевой степенью подвижности
4. кинематическая цепь, не распадающаяся на более простые кинематические цепи
5. кинематическая цепь с нулевой степенью подвижности
- Возможность непрерывного перехода звена из одного заданного положения в другое
1. ход звена
2. поворот звена
3. проворачиваемость звена
4. скорость звена
- Механизм с абсолютно жёсткими звеньями без зазора в кинематических парах
1. рычажный
2. кулачковый
3. идеальный
4. зубчатый
- Механизм первого класса…
1. состоит из двух подвижных звеньев
2. состоит из подвижного звена и стойки
3. состоит из двух звеньев и трёх кинематических пар
4. имеет высшую кинематическую пару
- Число механизмов первого класса в механизме равно
1. числу степеней свободы
2. единице
3. числу условий связи
4. числу групп Ассура
- Звено, совершающее полный оборот вокруг неподвижной оси называется…
1. кулиса
2. кривошип
3. ползун
4. шатун
- Подвижное звено (вращающееся, качающееся или движущееся возвратно поступательно), которое является направляющей ползуна называется…
1. кулиса
2. кривошип
3. ползун
4. шатун
- Формула Чебышёва
1. w = 3n - 2p5
2. w = 3n - 2p5
- p4
3. w = 3n - 2p5
- p4 - p3
4. w = 3n - 2p5 - p4 - p3 - p2
- Формулой w = 3n - 2p5 - p4 определяется…
1. класс механизма
2. вид механизма
3. число условий связи
4. степень подвижности
- В структурном анализе - k
1. число кинематических пар
2. число степеней свободы
3. общее число звеньев
4. число подвижных звеньев
- В структурном анализе n=k-1
1. число кинематических пар
2. число степеней свободы
3. общее число звеньев
4. число подвижных звеньев
- В формуле Чебышева - p5
1. число звеньев
2. число групп Ассура
3. число кинематических пар 5 класса
4. число степеней подвижности
- Механизм, по Асуру, состоит из первичных механизмов и последовательно присоединённых _____ групп Ассура.
1. первичных
2. структурных
3. многозвенных
4. кинематических
- Степень подвижности «СФЕРИЧЕСКОЙ» кинематической пары равна _____ .
1. единице
2. двум
3. трем
4. четырем
- Степень подвижности кинематической пары «Шар – Плоскость» равна
1. трем
2. единице
3. двум
4. пяти
- Количество ограничений налагаемые на относительное движение каждого
звена кинематической пары первого класса:
1. пять
2. четыре
3. шесть
4. одно
5. два
- Число степеней свободы кинематической цепи относительно _____ звена, называется степенью подвижности кинематической цепи.
1. неподвижного
2. входного
3. выходного
4. промежуточного
- Класс кинематической пары определяется …
1. характером соприкосновения звеньев
2. видом движения звеньев
3. числом ограничений на свободу относительного движения звеньев
4. числом звеньев, входящих в соединение
- Кинематическая пара, имеющая одну связь, - это … пара
1. одноподвижная
2. двухподвижная
3. трехподвижная
4. четырехподвижная
5. пятиподвижная
- Кинематическая пара, имеющая две связи, - это… пара
1. одноподвижная
2. двухподвижная
3. трехподвижная
4. четырехподвижная
5. пятиподвижная
- Кинематическая пара, имеющая три связи, - это… пара
1. одноподвижная
2. двухподвижная
3. трехподвижная
4. четырехподвижная
5. пятиподвижная
- Кинематическая пара, имеющая четыре связи, - это… пара
1. одноподвижная
2. двухподвижная
3. трехподвижная
4. четырехподвижная
5. пятиподвижная
- Кинематическая пара, имеющая пять связей, - это… пара
1. четырехподвижная
2. пятиподвижная
3. одноподвижная
4. двухподвижная
5. трехподвижная
- Как в теории механизмов и машин определяется класс пары?
1. по числу степеней свободы (W)
2. по числу наложенных связей (S)
3. по числу подвижных звеньев (N)
4. по рабочему ресурсу машины (кол-во лет)
-
Какое из перечисленных соединений является кинематической парой?
1.
Две сваренные
детали
2.
Две спаянные
детали
3.
Вал и подшипник
4.
Винт и гайка
-
Какая кинематическая пара относится к 5-му классу?
1.
Сферическая
2.
Цилиндрическая
3.
Вращательная
4.
Винтовая
-
Какая кинематическая пара относится к 1-му классу?
1.
Вращательная
2.
Поступательная
3.
Шар на плоскости
4.
Цилиндр на
плоскости
-
Какая кинематическая пара является плоской?
1.
Вращательная
2.
Поступательная
3.
Сферическая
4.
Винтовая
-
Какая кинематическая пара является низшей?
1.
Шар на плоскости
2.
Вращательная
3.
Цилиндр на
плоскости
4.
Поступательная
- Сколько
неподвижных звеньев в 6-звенном механизме?
1.
Одно
2.
Два
3.
Три
4.
Пять
- Чему
равна степень подвижности группы Ассура?
1.
Единице
2.
Нулю
3.
Двум
4.
Трем
- Чему
равна степень подвижности группы начальных звеньев, состоящей из стойки и
одного подвижного звена?
1.
Единице
2.
Нулю
3.
Двум
4.
Трем
- Чему
равна степень подвижности 4-звенного плоского рычажного механизма?
1.
Степени
подвижности группы Ассура
2.
Степени
подвижности группы начальных звеньев
3.
Двум
4.
Трем
- Чему
равна степень подвижности плоского рычажного 6-звенного механизма?
1.
Двум
2.
Единице
3.
Нулю
4.
Трем
-
Сколько кинематических пар образуют двукратный шарнир?
1.
Две
2.
Три
3.
Одна
4.
Четыре
- Чему
равно число звеньев, соединенных двукратным шарниром?
1.
Двум
2.
Трем
3.
Одному
4.
Четырем
- Чем
определяется класс группы Ассура по классификации Л.В.Ассура?
1.
Числом звеньев в
группе
2.
Числом
кинематических пар
3.
Классом
кинематических пар
4.
Видом
кинематической цепи
- Чем
определяется порядок группы Ассура?
1.
Числом звеньев в
группе
2.
Числом свободных
поводков
3.
Числом звеньев,
не имеющих свободных поводков
4.
Числом
кинематических пар
- Чем
определяется класс и порядок механизма по классификации Л.В.Ассура?
1.
Классом и
порядком самой сложной группы Ассура
2.
Классом и
порядком наиболее простой группы Ассура
3.
Классом и порядком
группы начальных звеньев
4.
Видом
кинематической цепи механизма
- Механизмы с высшими кинематическими парами превосходят механизмы с низшими кинематическими парами …
1. большей точностью преобразования движения
2. передачей движения на большие расстояния
3. возможностью передачи больших сил
4. использованием меньшего количества звеньев в цепи
- Звенья высшей кинематической пары соприкасаются …
1. по линии или в точке
2. по касательной
3. по поверхности
4. по плоскости
- Звенья низшей кинематической пары соприкасаются …
1. по линии
2. по касательной
3. по поверхности
4. в точке
- Кинематическая цепь, образованная звеньями входящими НЕ БОЛЕЕ ЧЕМ В ДВЕ кинематические пары, называется _____ .
1. сложной
2. простой
3. замкнутой
4. разомкнутой
- Кинематическая цепь, имеющая звено, входящая БОЛЕЕ ЧЕМ В ДВЕ кинематические пары, называется … цепью.
1. сложной
2. раскрытой
3. простой
4. обычной
- Плоскостная пара имеет число связей S=…
1. 1 (один)
2. 2 (два)
3. 3 (три)
4. 4 (четыре)
5. 5 (пять)
- Определите класс кинематической пары.
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
- Определите класс кинематической пары.
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
- Определите класс кинематической пары.
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
- Определите класс кинематической пары.
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
- Определите класс кинематической пары.
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
- Определите класс кинематической пары образованной звеньями 1 и 2.
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
- Определите класс кинематической пары.
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
- Определите класс кинематической пары.
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
- Определите класс кинематической пары.
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
- Определите класс кинематической пары.
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
- Определите класс кинематической пары.
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
- Определите класс кинематической пары.
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
- Определите класс кинематической пары.
1. 2 класс
2. 3 класс
3. 4 класс
4. 5 класс
- Кинематическая пара относится к … классу

1. 1
2. 3
3. 4
4. 2
5. 5
- Кинематическая пара относится к … классу

1. 3
2. 2
3. 1
4. 5
5. 4
- Кинематическая пара является

1. низшей
2. высшей
3. промежуточной
- Кинематическая пара является

1. низшей
2. высшей
3. промежуточной
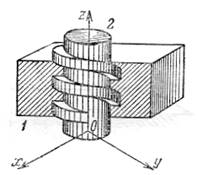
- Какого класса кинематическая пара приведена ниже?
«сфера – сфера со штифтом»

1. первого
2. второго
3. третьего
4. четвёртого
5. пятого
6. класс пары определить невозможно
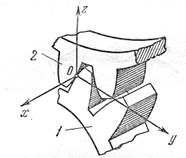
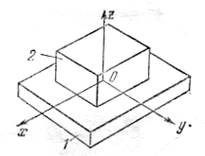
- Какого класса кинематическая пара приведена ниже?
«призма – плоскость»

1. первого
2. второго
3. третьего
4. четвёртого
5. пятого
6. класс пары определить невозможно
- Какого класса кинематическая пара приведена ниже?
«винтовая пара»

1. первого
2. второго
3. третьего
4. четвёртого
5. пятого
6. класс пары определить невозможно
- Какого класса кинематическая пара приведена ниже?
«сфера – сфера»

1. первого
2. второго
3. третьего
4. четвёртого
5. пятого
6. класс пары определить невозможно
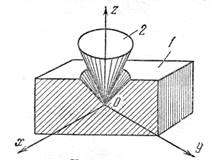
- Какого класса кинематическая пара приведена ниже?
«шар – плоскость»

1. первого
2. второго
3. третьего
4. четвёртого
5. пятого
6. класс пары определить невозможно
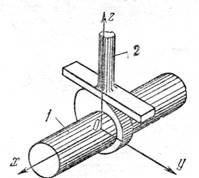
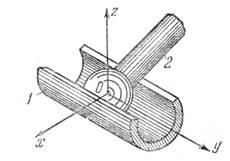
- Какого класса кинематическая пара приведена ниже?
«цилиндр – плоскость»

1. первого
2. второго
3. третьего
4. четвёртого
5. пятого
6. класс пары определить невозможно
- Какого класса кинематическая пара приведена ниже?
«плоскость – плоскость»

1. первого
2. второго
3. третьего
4. четвёртого
5. пятого
6. класс пары определить невозможно
- Какого класса кинематическая пара приведена ниже?
«цилиндр – плоскость»

1. первого
2. второго
3. третьего
4. четвёртого
5. пятого
6. класс пары определить невозможно
- Чему
равна степень подвижности механизма?

1.
Нулю
2.
Единице
3.
Двум
4.
Трем
- Что
представляет собой данная механическая система?

1.
Механизм
2.
Ферма
3.
Группа Ассура
4.
Группа начальных
звеньев
- Какого
класса данный механизм по классификации Л.В.Ассура?

1.
Первого
2.
Второго
3.
Третьего
4.
Четвертого
- Чему
равна степень подвижности механизма?

1.
Единице
2.
Двум
3.
Трем
4.
Четырем
- Чему
равна степень подвижности механизма?

1.
Единице
2.
Двум
3.
Трем
4.
Четырем
- Определить степень подвижности механизма и
найти его класс.
1. W=1, механизм II класса
2. W=2, механизм I класса
3. W=1, механизм I класса
4. W=2, механизм II класса
- Укажите правильное утверждение: группа Асура это…
1. кинематическая цепь второго класса, второго порядка
2. кинематическая цепь с нулевой степенью подвижности не распадающаяся на более простые кинематические цепи с нулевой степенью подвижности
3. кинематическая цепь, не распадающаяся на более простые кинематические цепи
4. кинематическая цепь с нулевой степенью подвижности
- Сколько групп Ассура присоединено к первичному механизму?
1. одна
2. две
3. три
4. четыре
- Какие из приведенных ниже достоинств вы отнесете к преимуществам низших кинематических пар перед высшими.
1.
отсутствие
замыкания звеньев
2.
высокая технологичность
3.
способность
передавать большие нагрузки и высокая износостойкость
4.
малые
ограничения на относительные движения
звеньев
- Число степеней свободы механизма равно

1. 0
2. 1
3. 2
4. -1
- Число степеней свободы механизма равно

1. 0
2. 1
3. 2
4. -1
- Число степеней свободы W манипулятора равно...

1. 1
2. 3
3. 5
4. 2
5. 4
- Число степеней свободы W манипулятора равно...

1. 6
2. 4
3. 1
4. 5
5. 3
- Число степеней свободы W манипулятора равно...

1. 7
2. 3
3. 6
4. 4
5. 5
- Число степеней свободы манипулятора равно …

1. 1
2. 2
3. 3
4. 4
5. 5
- Число степеней свободы манипулятора равно …

1. 1
2. 2
3. 3
4. 4
5. 5
- Число степеней свободы плоского механизма, структурная схема которого приведена на рисунке, равно...

1. 3
2. 1
3. 4
4. 2
5. 0
- Число степеней свободы механизма, структурная схема которого приведена на рисунке, равно...

1. 3
2. 2
3. 0
4. 1
- Число степеней свободы механизма, структурная схема которого приведена на рисунке, равно...

1. 3
2. 4
3. 1
4. 0
5. 2
- Число степеней свободы пространственного механизма, структурная схема которого приведена на рисунке, равно...

1. 1
2. 0
3. 4
4. 2
5. 3
- Число избыточных связей механизма, структурная схема которого приведена на рисунке, равно...

1. 1
2. 0
3. 3
4. 2
5. 4
- Число избыточных связей механизма, структурная схема которого приведена на рисунке, равно...

1. 3
2. 2
3. 4
4. 0
5. 1
- Число избыточных связей механизма, структурная схема которого приведена на рисунке, равно...

1. 2
2. 1
3. 4
4. 3
5. 0
- Число избыточных связей механизма, структурная схема которого приведена на рисунке, равно...

1. 1
2. 3
3. 4
4. 2
5. 0
- Число избыточных связей механизма, структурная схема которого приведена на рисунке, равно...

1. 1
2. 0
3. 2
4. 4
5. 3
- Кривошипом является звено...

1. 1
2. 0
3. 3
4. 2
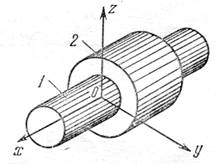
- Число степеней свободы у сферической кинематической пары равно...
![]()
1. 2
1. 1
3. 3
4. 4
- Число степеней свободы представленного на рисунке механизма равно...

1. 0
2. 4
3. 1
4. 2
5. 3
- Порядок группы равен...

1. 2
2. 4
3. 0
4. 3
5. 1
- Синтез рычажных механизмов, при котором получаемый механизм точно выполняет заданные условия синтеза только в заданном конечном числе его положений, называется...
1. структурным синтезом
2. интерполяционным синтезом
3. динамическим синтезом
4. кинематическим синтезом
- На рисунке приведена структурная схема шарнирного четырехзвенного механизма (1- кривошип, 3- коромысло). В крайних положениях механизма должны выполняться зависимости

1. φ12 = 0; φ12=π;
2. φ1 = 0; φ1=π;
3. φ1 = π/2; φ1=3π/2;
4. φ3 = 0; φ3=π;.
- Если φy - угол удаления; φд - угол дальнего стояния; φс - угол сближения; φб - угол ближнего стояния, то рабочий профильный угол δp определяется формулой...
1. ![]() ;
;
2. ![]() ;
;
3. ![]() ;
;
4. ![]() ;
;
5. ![]() .
.
- Дополнительные условия синтеза обычно выражаются в виде...
1. неравенств, устанавливающих допустимые области существования параметров синтеза
2. целевой функции
3. функции положения
4. первой передаточной функции
- Плоскостная кинематическая пара имеет...
1. одну вращательную и две поступательных степени свободы
2. одну вращательную и одну поступательную степени свободы
3. две вращательных и одну поступательную степеней свободы
4. три вращательных и одну поступательную степеней свободы
5. одну вращательную и три поступательных степени свободы
- Класс структурной группы равен...

1. 4
2. 1
3. 6
4. 2
5. 3
- Ход ползуна 3 H кривошипно-ползунного
механизма (см. рисунок) определяется зависимостью... (![]() - длина кривошипа 1:
- длина кривошипа 1: ![]() - длина шатуна 3)
- длина шатуна 3)

1. ![]()
2. ![]()
3. ![]()
4. ![]()
- К методам решения задач оптимизации в синтезе механизмов не относится
1. метод комбинированного поиска
2. метода направленного поиска
3. метод случайного поиска
4. метод планов скоростей и ускорений
- Параметрами синтеза механизма, устанавливаемые заданием на синтез, называются...
1. выходными параметрами синтеза механизмов
2. входными параметрами синтеза механизмов
3. геометрическими параметрами схемы механизма
4. параметрами синтеза механизма
- Свойство, которое выражает назначение механизма и должно быть обязательно выполнено в спроектированном механизме, называется...
1. параметром синтеза
2. этапом синтеза
3. основным условием синтеза
4. дополнительным условием синтеза
- Точка D будет занимать крайние положения если...

1. кривошип ОА будет находиться в вертикальном положении
2. звенья АО и АВ будут находиться на одной прямой
3. угол АВО1 будет равен 90°
4. кривошип ОА будет находиться в горизонтальном положении
- Проектирование механизма для получения его заданных свойств называется...
1. структурным синтезом механизма
2. динамическим синтезом механизма
3. синтезом механизма
4. кинематическим синтезом механизма
- В рычажном механизме двигателя Баландина (см. рис.) АВ=АС=ОА. Чему равны W, ![]() ,
класс механизма:
,
класс механизма:

1. W =1, qτ = 1, II класс
2. W =2, qτ = 0, II класс
3. W =0, III класс, qτ = 0
4. W =1, qτ = 0, II класс
- Что произойдет с механизмом (см. рис.), если соотношение
длин звеньев сделать произвольным ![]() :
:
:

1. В механизме появится еще одна степень свободы
2. Механизм превратится в статически определимую ферму
3. Механизм превратится в статически неопределимую ферму
4. Структурные признаки (W, q, класс) останутся без изменения
- Дайте характеристику кинематической цепи (см. рис.):

1. Механизм, W = 2, III класс
2. Статически определимая ферма
3. Механизм, W = 1, ![]() =
1, III класс
=
1, III класс
4. Статически определимая ферма, состоящая из двух структурных групп
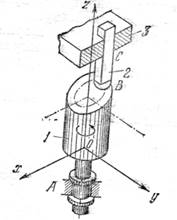
- В структурной схеме механизма долбежного станка (см. рис.) выделите элементарные механизмы и укажите способ их соединения:

- Спроектируйте самоустанавливающийся механизм долбежного станка (см. рис.). Укажите правильное решение среди перечисленных:
1. А(1в), В(1в), С(1п), D(1в), Е(1в), F(1в), G(1п)
2. А(1в), В(3с), С(2ц), D(1в), Е(1в), F(3с), G(2ц)
3. А(3с), В(3с), С(1п), D(1в), Е(3с), F(3с), G(1п)
4. А(1в), В(3с), С(2ц), D(1в), Е(3с), F(3с), G(1п)
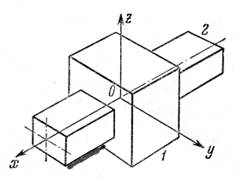
- При проектировании плоского самоустанавливающегося
механизма получены следующие структурные схемы (см. рис.). Укажите, что собой
представляет кинематическая цепь изображенная:
1) на рис. а; 2) рис. б; 3) рис.
в; г) рис. г, если ХХ||Х'Х'||Х"Х"
и ХХ![]() YY? Укажите
правильное решение среди перечисленных:
YY? Укажите
правильное решение среди перечисленных:

1. Кинематически неизменяемая система
2. Плоский несамоустанавливающийся механизм
3. Плоский самоустанавливающийся механизм
4. Пространственный механизм
5. Сферический механизм
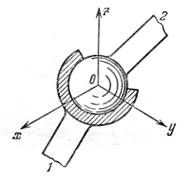
- Какую плоскую кинематическую пару образуют в плоской схеме звенья 1 и 2 (рис. а) механизма двигателя внутреннего сгорания:

1. Высшую одноподвижную
2. Высшую двухподвижную
3. Низшую одноподвижную
4. Низшую двухподвижную
email:
KarimovI@rambler.ru
Адрес: Россия, 450071, г.Уфа,
почтовый ящик 21
Теоретическая механика Сопротивление материалов
Прикладная механика Детали машин Строительная механика