Главная
Тестовые
вопросы по теме "Кинематический анализ рычажных механизмов"
- Целью кинематического анализа является…
1. определение положения звеньев
механизма
2. определение перемещений точек
механизма
3. определение ускорений и
траекторий звеньев механизма
4. определение скоростей,
ускорений точек механизма, угловых скоростей и ускорений его звеньев, перемещений
и траекторий
- Исходными данными для
кинематического анализа служит
1. структурная схема механизма
2. конструктивная схема
механизма
3. кинематическая схема
механизма, расположенная в прямоугольной системе координат
4. структурная схема в прямоугольной
системе координат
- Кинематический синтез – это…
1. определение структуры механизмов
2. определение параметров схемы
механизма по заданным кинетическим свойствам
3. определение параметров схемы
механизма по заданным динамическим свойствам
4. определение проворачиваемости
звеньев
- Раздел ТММ, изучающий
закономерности движения звеньев механизма под действием приложенных к ним сил
называется _____.
1. динамикой
2. статикой
3. кинематикой
4. кинетостатикой
- Определение силового
управляющего воздействия, обеспечивающего заданный закон движения, называется
_____ задачей динамики.
1. обратной
2. прямой
3. главной
4. силовой
- Интеграл скалярного
произведения вектора силы и вектора элементарного приращения перемещения точки
её приложения, называется …
1. работой силы
2. мощностью силы
3. кинетической энергией
4. потенциальной энергией
- Промежуток времени от момента
начала движения ведущего звена до момента конца его движения
1. разгон
2. полное время движения
3. торможение
4. цикл движения
- Звенья, составляющие
динамическую модель механизма или машины.
1. ведомое
2. ведущее
3. выходное
4. промежуточное
5. стойка
- Методы составления
динамической модели механизма:
1. кинематический
2. кинетостатический
3. кинематический
4. статический
5. структурный
6. энергетический
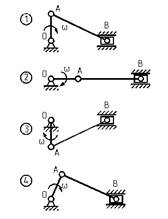
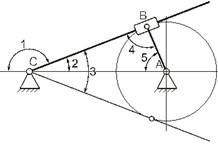
- Точка С ползуна будет занимать
крайние положения, если точка B кривошипа будет расположена в точках …
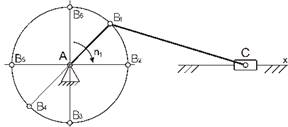
1. В2 и В5
1. В3 и В4
1. В1 и В4
1. В1 и В2
1. В3 и В6
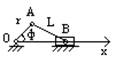
- Угол размаха кулисы обозначен
цифрой…
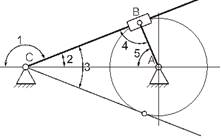
1. 4
2. 1
3. 2
4. 3
5. 5
- Механизм, в котором точка на
звене воспроизводит заданную траекторию называют…
1. передаточным механизмом
2. кулисным механизмом
3. зубчатым механизмом
4. направляющим механизмом
5. рычажным механизмом
- Отношение средних скоростей
выходного звена за время его движения в прямом и обратном направлениях
называется…
1. коэффициентом динамичности
2. коэффициентом жесткости
3. коэффициентом перекрытия
4. коэффициентом неравномерности
движения механизма
5. коэффициентом изменения
средней скорости выходного звена
- Динамический синтез – это…
1. определение параметров схемы
механизма по заданным кинематическим свойствам
2. определение числа степеней свободы
механизма
3. определение структуры
механизма
4. определение параметров схемы
механизма по заданным динамическим свойствам
- Свойства механизма, которые
должны учитываться при проектировании, но не отражать его основное назначение
называются…
1. целевой функцией
2. основным условием синтеза
3. параметрами синтеза
4. дополнительным условием
синтеза
- Уравнение для определения
кинетической энергии звена совершающего вращательное движение, имеет вид …..
1. ![]()
2. ![]()
3. ![]()
4. ![]()
- Уравнение для определения
кинетической энергии звена совершающего сложное плоскопараллельное движение,
имеет вид …..
1. ![]()
2. ![]()
3. ![]()
4. ![]()
- Уравнение для определения
кинетической энергии звена совершающего поступательное движение, имеет вид …..
1. ![]()
2. ![]()
3. ![]()
4. ![]()
- Уравнение для определения
кинетической энергии звена, совершающего вращательное движение, имеет вид …
1. ![]()
2. ![]()
3. ![]()
4. ![]()
- Уравнение для определения
кинетической энергии звена, совершающего поступательное движение, имеет вид …
1. ![]()
2. ![]()
3. ![]()
4. ![]()
- Условный момент, которым
обладает звено приведения относительно оси вращения, называется … момент
1. элементарный
2. обобщённый
3. суммарный
4. приведённый
- Формула для определения
приведенного момента сил (МП – приведенный момент сил; FП –
приведенная сила; l – длина звена приведения)
1. ![]()
2. ![]()
3. ![]()
4. ![]()
- Равномерность движения
механизма оценивается коэффициентом …
1. неравномерности
2. динамичности
3. равномерности
4. движения
- Колебания значений угловой
скорости ведущего звена являются причиной возникновения вынужденных _____
звеньев.
1. колебаний
2. движений
3. перемещений
4. сил
- Маховик в механизмах…
1. уменьшает амплитуду
периодических колебаний скорости начального звена
2. увеличивает амплитуду
периодических колебаний скорости начального звена
3. уменьшает вибрацию при работе
механизма
4. изменяет направление вращение
начального звена
-
Какой из методов кинематического анализа дает наибольшую точность?
1.
Графический
2.
Аналитический
3.
Графо-аналитический
4.
Экспериментальный
-
Векторы каких скоростей (ускорений) исходят из полюса плана скоростей (плана
ускорений)?
1.
Абсолютных
скоростей
2.
Относительных
скоростей
3.
Абсолютных
ускорений
4.
Относительных
ускорений
- Как направлен вектор скорости
точки А кривошипа ОА при известном направлении его вращения?
1. параллельно звену ОА к
центру вращения
2. перпендикулярно к звену ОА
в сторону его вращения
3. параллельно звену ОА в
сторону от центра вращения
4. перпендикулярно к звену ОА
в сторону, противоположную его вращению
- Как направлено ускорение точки
А кривошипа ОА, если его угловая скорость постоянна?
1. параллельно звену ОА к
центру вращения
2. перпендикулярно к звену ОА
в сторону его вращения
3. параллельно звену ОА в
сторону от центра вращения
4. перпендикулярно к звену ОА
в сторону, противоположную его вращению
- Как связаны между собой тела
(детали), образующие одно звено?
1. подвижно
2. неподвижно
3. шарнирно
4. скользящей посадкой
- Какие кинематические пары
подвергаются большему износу:
1. низшие
2. высшие
3. изнашиваются одинаково
4. не изнашиваются
- Какие кинематические пары
являются высшими:
1. соединение вала с подшипником
скольжения
2. сцепление зубьев в зубчатых
передачах
3. соединение ползуна и
направляющей
4. соединение шариков с дорожкой
качения в подшипнике качения
- Какое звено является ведущим в
кривошипно-ползунном механизме поршневого компрессора:
1. кривошип
2. шатун
3. кулиса
4. ползун
- Какое звено является ведущим в
кривошипно-ползунном механизме двигателя внутреннего сгорания:
1. кривошип
2. шатун
3. кулиса
4. ползун
- При действии на ведущее звено
механизма уравновешивающей силы или уравновешивающего момента:
1. поддерживается движение
механизма
2. механизм приводится в
состояние равновесия
3. механизм замедляет движение
4. механизм ускоряется
- Параметры, определяемые при
кинематическом анализе механизмов.
1. движущая сила
2. движущий момент
3. угловое ускорение
4. сила тяжести
5. угловая скорость
6. момент сопротивления
- Вид анализа механизмов, при
проведении которого определяются линейные ускорения отдельных точек звеньев
механизма…
1. кинематический
2. динамический
3. структурный
4. силовой
- Неверно, что кинематическими
характеристиками являются …
1. траектории точек
2. обобщенные координаты
3. силы трения
4. скорости точек и звеньев
механизма
5. равномерность вращения
начального звена
- Соотношение скоростей в
механизме зависит …
1. от формы звеньев механизма
2. от кинематической схемы
механизма
3. от жёсткости звеньев
4. от соединений кинематических
пар
- Скорости и ускорения отдельных
точек механизма графически определяют…
1. с помощью мгновенных центров
скоростей и ускорений, методом планов и диаграмм
2. с помощью геометрических мест
точек
3. методом засечек
4. методом аналогов
- Кинематическая диаграмма - это…
1. график изменения какого-либо
кинематического параметра механизма в функции его обобщённой координаты или
времени
2. график аналогового параметра
3. график функции перемещения от
времени
4. график мгновенных ускорений
от угла поворота кривошипа
- Векторы каких скоростей
(ускорений) исходят из полюса плана скоростей (плана ускорений)?
1. абсолютных скоростей
2. относительных скоростей
3. абсолютных ускорений
4. угловых скоростей и ускорений
- Движение, при котором кинетическая
энергия механизма постоянна или является периодической функцией времени,
называется...
1. режимом неустановившегося
движения
2. режимом выбега
3. режимом установившегося
движения
4. режимом разбега
-
Процесс движения машинного агрегата
состоит из разбега, …… и выбега.
1.
неустановившегося движения
2. пускового
момента
3.
установившегося движения
-
Процесс движения машинного агрегата
состоит из разбега, установившегося
движения и …
1. выбега
2.
неустановившегося движения
3. пускового
момента
-
Процесс движения машинного агрегата
состоит из ….., установившегося движения и выбега.
1. разбега
2.
неустановившегося движения
3. пускового
момента
-
Равномерность движения входного звена
повышают, …… звеньев.
1. увеличивая
массы отдельных
2. увеличивая
скорость вращения
3. уменьшая
количество
4. увеличивая
количество
- При
совпадении частоты вынужденных колебаний механизма с частотой собственных
колебаний возникает ....
1.
резонанс
2.
диссонанс
3.
вибрация
4. амортизация
-
Сбалансированный ротор при изменении угловой скорости входного звена ….
1. остается
уравновешенным
2. перестает
быть уравновешенным
3. меняет
положение центра масс
- Для
реализации движения выходного звена с длительными остановками (паузами) можно использовать …. механизмы.
1.
зубчатые
2.
червячные
3. кулачковые
4. винтовые
- Обобщёнными координатами
механизма могут быть…
1. угловая координата ведущего
звена и его линейная координата
2. координата звеньев
3. координата кинематических пар
4. угловые координаты звеньев
- ..… называются независимые
между собой координаты звеньев механизма, однозначно определяющие положения
всех его звеньев
1. начальными
2.обобщенными
3. нормальными
4. избыточными
- ..…Число степеней свободы
механизма с голономными (не зависящими от скорости ) связями равно числу….
координат
1. начальных
2. нормальных
3. обобщенных
4. избыточных
- Звено, которому приписывается
одна или несколько обобщенных координат, называется
1. начальным
2. входным
3. выходным
4. промежуточным
- Передаточное
отношение редуктора по абсолютной величине
….
1. больше
единицы
2. равно
единице
3. меньше
единицы
- Равномерность движения механизма оценивается коэффициентом ….
1. неравномерности
2. динамичности
3. равномерности
4. движения
- Скорость
входного звена при установившемся движении машинного агрегата …..
1. меняется
периодически
2. остается
постоянной
3. достигает
минимального значения
- Размеры и массу маховика уменьшают, устанавливая маховик на …. вал
1. более быстроходный
2. менее быстроходный
3. промежуточный
- Размеры и
массу маховика уменьшают …..
1.
устанавливая маховик на более быстроходный вал
2.
устанавливая маховик на тихоходный вал
3. повышая угловую
скорость вращения входного звена
4.
понижая угловую скорость вращения
входного звена
- Маховик в
механизмах ….
1. уменьшает
амплитуду периодических колебаний скорости начального звена
2.
увеличивает амплитуду периодических колебаний скорости начального звена
3. уменьшает
вибрацию при работе механизма
4. изменяет
направление вращения входного звена
- Метод планов относится к...
1. аналитическим методам
кинематики
2. экспериментальным методам
кинематики
3. графоаналитическим методам
кинематики
4. графическим методам
кинематики
- Отношение действительного
значения физической величины, к длине отрезка, которым эта величина
изображается на чертеже называется…
1. планом ускорений
2. аналогом скорости точки
3. вычислительным масштабом
4. передаточной функцией
5. планом скоростей
- Центростремительное ускорение
точки звена, совершающего плоское движение, рассчитывается по формуле…
1. ![]()
2. ![]()
3. ![]()
4. ![]()
- Вращательное ускорение точки
звена, совершающего плоское движение, рассчитывается по формуле…
1. ![]()
2. ![]()
3. ![]()
4. ![]()
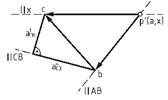
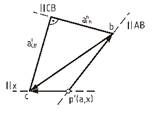
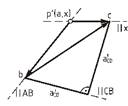
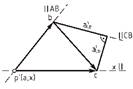
-
Какой вектор на плане скоростей изображает относительную скорость звена АВ?
1.
Вектор Пa
2.
Вектор Пb
3.
Вектор Пc
4.
Вектор ab
-
Какой вектор на плане скоростей изображает скорость точки С звена АВ?
1. Вектор Пa
2. Вектор Пb
3. Вектор Пc
4. Вектор ab
- С
помощью какой скорости можно определить угловую скорость звена АВ?
1. Скорость точки А
2. Скорость точки B
3. Скорость точки C
4. Относительная скорость звена АВ
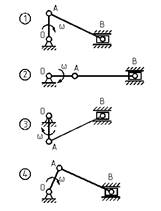
- Для
какого положения механизма скорость точки А равна скорости точки В?
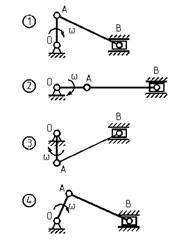
1. Положение 1
2. Положение 2
3. Положение 3
4. Положение 4
- Для
какого положения механизма скорость точки В равна нулю?
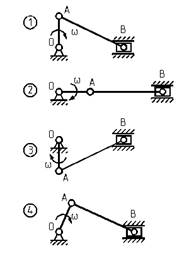
1. Положение 1
2. Положение 2
3. Положение 3
4. Положение 4
- Для
какого положения механизма скорость точки А равна относительной скорости звена
АВ?
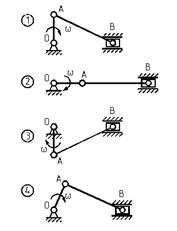
1. Положение 1
2. Положение 2
3. Положение 3
4. Положение 4
- Для
какого положения механизма относительная скорость звена АВ равна нулю?
1.
Положение 1
2.
Положение 2
3.
Положение 3
4.
Положение 4
- С
помощью какого ускорения можно определить угловое ускорение звена АВ?
1.
Ускорение точки А
2.
Нормальная
составляющая относительного ускорения звена АВ
3.
Тангенциальная
составляющая относительного ускорения звена АВ
4.
Ускорение точки В
-
Направлением какого ускорения определяется направление углового ускорения звена
АВ?
1.
Нормальной
составляющей относительного ускорения звена АВ
2.
Тангенциальной составляющей
относительного ускорения звена АВ
3.
Полного
относительного ускорения звена АВ
4.
Ускорения точки В
- Для
какого положения механизма угловая скорость звена АВ равна нулю?
1.
Положение 1
2.
Положение 2
3.
Положение 3
4.
Положение 4
- Для
какого положения механизма угловое ускорение звена АВ равна нулю?
1.
Положение 1
2.
Положение 2
3.
Положение 3
4.
Положение 4
-
Угловая скорость кривошипа рычажного механизма постоянна. Угловое ускорение
какого звена этого механизма будет равно нулю?
1.
Шатуна
2.
Коромысла
3.
Кривошипа
4.
Ползуна
- Для
какого звена необходимо определять ускорение Кориолиса?
1.
Звена,
совершающего вращательное движение
2.
Звена,
совершающего поступательное движение
3.
Звена,
совершающего сложное движение
4.
Звена,
совершающего плоскопараллельное движение
-
Какое положение является крайним ("мертвым") для центрального
кривошипно-шатунного механизма?
1.
Положение, в
котором скорость ползуна является максимальной
2.
Положение, в котором
скорость ползуна является минимальной
3.
Положение, в
котором скорость ползуна равна нулю
4.
Положение, в
котором скорость ползуна является средней между максимальной и минимальной
- Что
не входит в задачи кинематического анализа механизмов?
1.
Определение
положений звеньев и траекторий точек
2.
Определение
линейных скоростей и ускорений точек
3.
Определение
угловых скоростей и ускорений звеньев
4.
Определение
размеров звеньев механизма
-
Рычажный механизм состоит из группы начального звена и трех групп Ассура. С какой
группы следует начинать кинематический расчет этого механизма?
1.
С группы
начального звена
2.
С группы Ассура,
соединенной с группой начального звена
3.
С группы Ассура,
наиболее удаленной от группы начального звена
4.
Порядок расчета
не имеет значения
-
Какие параметры подлежат определению при кинематическом расчете группы Ассура с
тремя вращательными парами аналитическим методом?
1.
Координаты
внешних кинематических пар
2.
Координаты
внутренней кинематической пары
3.
Длины звеньев
группы
4.
Угловые положения
звеньев
- Чем
определяется показатель сборки при кинематическом расчете группы Ассура с тремя
вращательными парами аналитическим методом?
1.
Знаком момента
вектора группы относительно внутренней кинематической пары
2.
Знаком углов
поворота звеньев
3.
Направлением
вектора группы
4.
Знаком угла,
определяющего угловое положение вектора группы
-
Какие параметры подлежат определению при кинематическом расчете группы Ассура с
двумя вращательными и внешней поступательной парами аналитическим методом?
1.
Расстояние от
начала координат до направляющей
2.
Координаты
ползуна
3.
Координаты
внешней вращательной пары
4.
Угловое положение
шатуна
- Чем
определяется показатель сборки при кинематическом расчете группы Ассура с двумя
вращательными и внешней поступательной парами аналитическим методом?
1.
Знаком угла
поворота оси Y до совмещения ее с единичным вектором n
2.
Знаком косинуса
угла между осью X' правой системы координат и вектором группы
3.
Знаком угла,
определяющего угловое положение шатуна
4.
Знаком расстояния
от начала координат до направляющей
- Чем
определяется направление осей X' и Y' правой системы координат при
кинематическом расчете группы Ассура с двумя вращательными и внешней поступательной
парами аналитическим методом?
1.
Оси X' и Y'
сонаправлены с единичными векторами τ
и n
2.
Оси X' и Y'
сонаправлены с осями координат X и Y
3.
Ось X'
сонаправлена с единичным вектором n
4. Ось Y' сонаправлена с единичным вектором τ
- Укажите уравнение движения машины при вращательном движении звеньев механизма.
1. ![]() ;
;
2. ![]() ;
;
3. ![]() ;
;
4. ![]()
- Неравномерность хода машины определяется по следующей формуле:
1. ![]() ;
;
2. ![]() ;
;
3. ![]() ;
;
4. ![]()
- Какое свойство является главным для определения дифференциального механизма.
1. число степеней равно единицы
2. число степеней свободы более единицы
3. способность замедлять движение
4. отсутствие подвижности
- Какое из следующих утверждений верно?
1. векторы, выходящие из полюса р плана скоростей изображают в масштабе абсолютные скорости соответствующих точек
2. векторы, проходящие через полюс плана скоростей, соответствуют угловым скоростям звеньев
3. векторы, не проходящие через полюс плана скоростей, соответствуют угловым скоростям звеньев
4. векторы, выходящие из полюса р плана скоростей изображают в масштабе относительные скорости
- Укажите, какая характеристика соответствуют установившемуся движению механизма:
1. скорость начального звена изменяется произвольно
2. скорость начального звена постоянна или изменяется периодически и незначительно
3. скорость начального звена длительное время убывает
4. скорость начального звена длительное время возрастает
- Что такое μ в следующем выражении:
![]()
1. масштабный коэффициент при построении планов скоростей
2. величина скорости в миллиметрах чертежа
3. величина отрезка pvb в миллиметрах чертежа
4. абсолютная величина вектора скорости точки В
- За время некоторого целого числа периодов установившегося движения приращение кинетической энергии:
1. положительно
2. отрицательно
3. равно нулю
4. неизвестно
- По какой формуле определяется кориолисово ускорение?
1. ![]() ;
;
2. ![]() ;
;
3. ![]() ;
;
4. ![]() .
.
- По какой формуле определяется нормальное ускорение?
1. ![]() ;
;
2. ![]() ;
;
3. ![]() ;
;
4. ![]() .
.
- Укажите движущую силу
1. сила тяжести груза, поднимаемого мостовым краном
2. сила резания при обработке на токарном станке
3. сила трения между поршнем и цилиндром двигателя внутреннего сгорания
4. сила, обусловленная давлением газа на поршень двигателя внутреннего сгорания
- Как определить угловое ускорение?
1. ![]() ;
;
2. ![]()
3. ![]() ;
;
4. ![]() .
.
- Кинематический анализ механизма – это...
1. определение реакций действующих в кинематических парах механизма
2. определение уравновешивающей силы на входном звене механизма
3. определение движения звеньев механизма по заданному движению начальных звеньев
4. определение движения звеньев механизма по приложенным к ним силам или определение сил по заданному движению звеньев
5. определение количества кинематических пар из которых составлен механизм
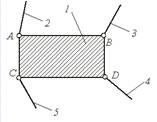
- Кинематическая цепь, приведенная на рисунке, является...
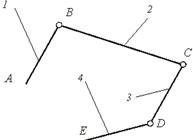
1. сложной незамкнутой
2. простой незамкнутой
3. простой замкнутой
4. сложной замкнутой
- Число поступательных кинематических пар в механизме, структурная схема которого приведена на рисунке, равно...
1. 2
2. 1
3. 4
4. 3
5. 0
- Число вращательных кинематических пар в механизме, структурная схема которого приведена на рисунке, равна...
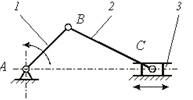
1. 4
2. 3
3. 2
4. 0
5. 1
- На рисунке приведено условное обозначение (по ГОСТ 2.770-68*)...
![]()
1. вращательной кинематической пары
2. цилиндрической кинематической пары
3. сферической кинематической пары
4. поступательной кинематической пары
5. винтовой кинематической пары
- Число поступательных кинематических пар в механизме, структурная схема которого приведена на рисунке, равно...
1. 0
2. 4
3. 2
4. 1
5. 3
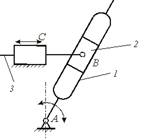
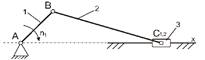
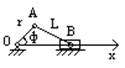
- Угол размаха кулисы обозначен цифрой...
1. 5
2. 2
3. 1
4. 4
5. 3
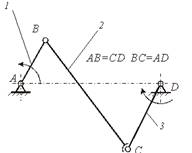
- Кинематическая цепь, структурная схема которой приведена на рисунке, является...
1. плоской простой замкнутой
2. пространственной сложной незамкнутой
3. плоской сложной замкнутой
4. плоской простой незамкнутой
5. плоской сложной незамкнутой
- Метод планов относится к...
1. аналитическим методам кинематики
2. экспериментальным методам кинематики
3. графоаналитическим методам кинематики
4. графическим методам кинематики
- Планом механизма называется…
1. геометрические зависимости, связывающие
координаты ведомых звеньев с координатами ведущего или начального звена;
2. изображение соединения звеньев механизма;
3. чертеж группы векторов скоростей и
ускорений;
4. чертеж, изображающий кинематическую схему
механизма, соответствующую определенному положению начального механизма звена;
5. графическое изображение основных кинематических
характеристик движения за полный цикл работы.
- Планом
скоростей называется…
1. векторы относительных скоростей точек
жесткого звена;
2. чертеж, на котором изображены векторы,
равные по модулю и направлению векторам различных точек механизма;
3. изображения векторов;
4. чертеж, на котором изображены в
определенном масштабе векторы, равные по модулю и направлению скоростям точек
механизма.
- Режимы движения механизмов - это период…(несколько
правильных ответов)
1. постоянства средней угловой скорости
ведущего звена механизма;
2. в течение которого происходит увеличение
энергии звеньев механизма;
3. периоды работы, ремонта, простоя механизма;
4. в течение которого происходит уменьшение
кинетической энергии звеньев
механизма;
5. в течение которого происходит уменьшение
потенциальной энергии звеньев
механизма;
6. в течение которого происходит нарастание
скорости движения звеньев механизма и кинетической энергии его звеньев;
7. испытания механизмов на прочность,
точность, виброустойчивость и другие параметры.
- На рисунке приведен график зависимости угловой скорости начального звена механизма ω от времени t. Режим движения механизма, соответствующий участку 3 графика, называется...
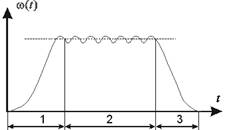
1. фазой установившегося движения
2. фазой выбега
3. фазой разбега
4. фазой сближения
- Установившимся движением механизма называется...
1. движение, при котором направление угловой скорости начального звена механизма не меняется
2. движение, при котором кинетическая энергия механизма убывает
3. движение, при котором кинетическая энергия механизма возрастает
4. движение, при котором кинетическая энергия механизма постоянна или является периодической функцией времени
- На рисунке показана кинематическая схема шестизвенного плоского механизма. Укажите верную расчетную схему структурной группы 4-5 для силового расчета механизма на основе метода кинетостатики
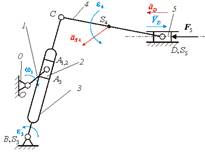
1. 
2. 
3. 
4. 
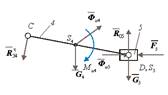
- Чтобы определить по плану ускорений абсолютное ускорение точки С необходимо воспользоваться формулой...
1. ![]()
2. ![]()
3. ![]()
4. ![]()
5. ![]()
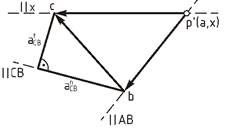
- Верным планом ускорений для данного положения механизма (n1 = const) является...
1. 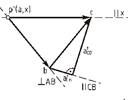 2.
2.  3.
3. 
4.  5.
5. 
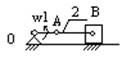
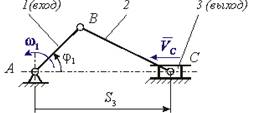
- Угловая скорость шатуна 2 в
заданном положении механизма равна …
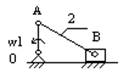
ω 1 = 10 рад/с; ОА =
0,02 м; АВ = 0,1 м
1. 10 рад/с
2. 2 рад/с
3. 0
4. 20 рад/с
- Угловая скорость шатуна 2 в
заданном положении механизма равна …
ω 1 = 10 рад/с; ОА =
0,02 м; АВ = 0,1 м
1. 10 рад/с
2. 2 рад/с
3. 0
4. 20 рад/с
- Ускорение ползуна 3 в заданном
положении механизма равно …
ω 1 = 10 рад/с; ОА =
0,02 м; АВ = 0,1 м
1. 2 м/с2
2. 2,4 м/с2
3. 0
4. 1,6 м/с2
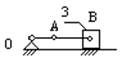
- Функция положения точки В
кривошипно-ползунного механизма ![]() ,
где А – постоянная величина;
,
где А – постоянная величина; ![]()
Кинематическая передаточная
функция скорости точки В …
1. ![]()
2. ![]()
3. ![]()
4. ![]()
- Функция положения точки В
кривошипно-ползунного механизма ![]() ,
где А – постоянная величина.
,
где А – постоянная величина. ![]()
Кинематическая передаточная
функция скорости точки В…
1. ![]()
2. ![]()
3. ![]()
4. ![]()
- Кинематическая передаточная
функция скорости точки В кривошипно-ползунного механизма ![]() .
.
![]()
Кинематическая передаточная
функция ускорения точки В…
1. ![]()
2. ![]()
3. ![]()
4. ![]()
- Динамика механизмов изучает...
1. движение звеньев механизмов под действием некоторой системы сил
2. строение механизмов
3. деформации звеньев механизмов, возникающие при их движении
4. методы расчета звеньев механизмов на прочность и жесткость
5. движение механизмов с геометрической точки зрения, без учета действующих сил
- Динамическим синтезом называется...
1. определение параметров схемы механизма по заданным кинематическим свойствам
2. определение числа степеней свободы механизма
3. определение структурной схемы механизма
4. проектирование кинематической схемы механизма и выбор инерционных параметров с учетом его динамических свойств
- Отношение действительного значения физической величины, к длине отрезка, которым эта величина изображается на чертеже называется...
1. планом скоростей
2. вычислительным масштабом
3. аналогом скорости точки
4. планом ускорений
5. передаточной функцией
- Метод преобразования координат относится к...
1. экспериментальным методам кинематики
2. аналитическим методам кинематики
3. графоаналитическим методам кинематики
4. графическим методам кинематики
- Углом давления называется...
1. угол между силой и ускорением точки ее приложения
2. угол между скоростью и ускорением центра масс звена
3. угол между полной и нормальной реакцией, возникающей между контактирующими звеньями
4. угол между силой и скоростью точки ее приложения
- Угол давления в кинематических парах является...
1. дополнительным условием синтеза
2. основным условием синтеза
3. целевой функцией
4. этапом синтеза
- Условию статической определимости удовлетворяет...
1. любая кинематическая цепь, содержащая только низшие кинематические пары
2. любая кинематическая цепь
3. любая группа Ассура
4. любая кинематическая цепь с числом звеньев не более трех
- Аналогом угловой скорости называется...
1. вторая производная угла поворота по времени
2. первая производная угла поворота по времени
3. вторая производная угла поворота звена по обобщенной координате механизма
4. производная ускорения точки по времени
5. первая производная угла поворота звена по обобщенной координате механизма
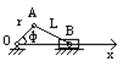
- На рисунке приведена кинематическая схема кривошипно-ползунного механизма компрессора. Функция положения этого механизма записывается в виде...
1. ![]()
2. ![]()
3. ![]()
4. ![]()
- На рисунках ответов приведены графики зависимости аналогов ускорения и скорости от угла поворота кулачка. Укажите закон движения толкателя, при котором отсутствуют удары.
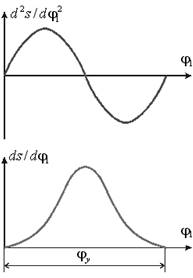
Первая производная угла поворота звена по обобщенной координате механизма называется...
1. аналог ускорения точки
2. вычислительным масштабом
3. передаточной функцией
4. аналогом угловой скорости
5. аналогом углового ускорения
- Режимом разбега механизма называется...
1. переходное движение между установившимся движением механизма и покоем
2. движение, при котором направление угловой скорости начального звена механизма не меняется
3. движение, при котором кинетическая энергия механизма постоянна или является периодической функцией времени
4. переходное движение между покоем и установившимся движением механизма
- Режимом выбега механизма называется...
1. движение, при котором направление угловой скорости начального звена механизма не меняется
2. переходное движение между установившимся движением механизма и покоем
3. переходное движение между покоем и установившимся движением механизма
4. движение, при котором кинетическая энергия механизма постоянна или является периодической функцией времени
- Уравнение движения механизма с одной степенью свободы в дифференциальной форме записывается в виде...
(![]() - приведенный момент инерции;
- приведенный момент инерции; ![]() - приведенный момент сил; φ - угловая координата звена приведения; ω - угловая скорость звена приведения; t - время)
- приведенный момент сил; φ - угловая координата звена приведения; ω - угловая скорость звена приведения; t - время)
1. ![]() ;
;
2. ![]() ;
;
3. ![]() ;
;
4. ![]() .
.
- Ротором в теории уравновешивания называется...
1. любое тело, для которого главный вектор и главный момент сил инерции не постоянны
2. любое тело, совершающее поступательное движение
3. любое тело, совершающее плоскопараллельное движение
4. любое тело, совершающее вращательное движение
- Приведенный момент инерции плоского механизма, определяется из условия...
1. равенства приведенного момента инерции и суммы моментов инерции всех звеньев механизма, относительно осей, проходящих через их центры масс перпендикулярно плоскостям движения точек звеньев механизма
2. равенства кинетической энергии динамической модели механизма и суммы кинетических энергий всех звеньев механизма
3. равновесия механизма
4. равенства приведенного момента инерции и суммы моментов инерции всех звеньев механизма, относительно оси вращения звена приведения
- Звено плоского рычажного механизма, совершающее вращательное движение, называется...
1. шатуном
2. ползуном
3. кривошипом
4. коромыслом
5. кулисой
- Звено плоского механизма, совершающее сложное плоскопараллельное движение, называется ….
1. шатуном
2. ползуном
3. кривошипом
4. коромыслом
5. кулисой
- Звено плоского механизма, совершающее поступательное движение, называется ….
1. шатуном
2. ползуном
3. кривошипом
4. коромыслом
5. кулисой
- Звено плоского рычажного механизма, совершающее качательное (колебательное) движение, называется ….
1. шатуном
2. ползуном
3. кривошипом
4. коромыслом
5. кулисой
- Неподвижное (условно неподвижное) звено на схемах механизма называется …
1. основанием
2. корпусом
3. стойкой
4. станиной
- Кинематической парой называют…
1. два соприкасающихся звена
2. жесткое соединение двух деталей
3. подвижное соединение двух соприкасающихся звеньев
4. две детали, соединенные подвижно
- Механизм, движение точек всех подвижных звеньев которого осуществляется в пересекающихся плоскостях, называют…
1. симметричным
2. плоским
3. пространственным
4. линейным
5. V- образным
- Механизм, движение точек всех подвижных звеньев которого осуществляется в одной или параллельных плоскостях, называют…
1. линейным
2. пространственным
3. плоским
4. симметричным
- Звенья низшей кинематической пары соприкасаются…
1. по линии
2. по касательной
3. по поверхности
4. в точке
- Звенья высшей кинематической пары соприкасаются …
1. по линии или в точке
2. по поверхности
3. по касательной
- Степень подвижности плоского механизма вычисляют по формуле…
1. Сомова-Малышева
2. Герца
3. Жуковского
4. Озола
5. Чебышева
- Формула Чебышева для расчета степени подвижности плоского механизма имеет вид …
1. W=3n+2p5+p4
2. W=3n-3p5-p4
3. W=3n-2p5+p4
4. W=3n-2p5-p4
5. W=3n-3p5+p4
- Формулой строения обладает механизм … класса
1. первого
2. второго
3. третьего
4. четвертого
- Структурной группой Асура называется кинематическая цепь, которая после присоединения элементов ее крайних кинематических пар к стойке имеет степень подвижности, равную …
1. единице
2. трем
3. нулю
4. двум
5. четырем
- Класс кинематической пары определяется …
1. характером соприкосновения звеньев
2. видом движения звеньев
3. числом ограничений на свободу относительного движения звеньев
4. числом звеньев, входящих в соединение
- Передаточное отношение многоступенчатой зубчатой передачи равно…передаточных отношений отдельных одноступенчатых передач, образующих ее.
1. произведению
2. отношению
3. сумме
4. разности
- Величина кориолисова ускорения определяется уравнением …
1. ![]()
2. ![]()
3. ![]()
4. ![]()
- Параметры, являющиеся кинематическими характеристиками механизма, - это …
1. передаточное отношение
2. силы инерции
3. класс механизма
4. степень подвижности механизма
5. масса механизма
- Кинематической характеристикой зубчатой передачи являются …
1. угловые скорости колес
2. числа зубьев колес
3. модуль передачи
4. межосевое расстояние
5. толщины зубьев
- Нормальная составляющая ускорения в относительном движении точки В относительно точки А звена рассчитывается по формуле …
1. ![]()
2. ![]()
3. ![]()
4. ![]()
- Кориолисово ускорение учитывается при кинематическом анализе…
1. зубчатого механизма
2. механизма шарнирного четырехзвенника
3. кулисного механизма
- Параметры, являющиеся кинематическими характеристиками механизма, это…
1. передаточное отношение
2. силы инерции
3. класс механизма
4. степень подвижности механизма
- Угловую скорость звена через линейную скорость в относительном движении двух его точек рассчитывают по формуле …
1. ![]()
2. ![]()
3. ![]()
4. ![]()
5. ![]()
- Тангенциальная составляющая ускорения в относительном движении точки В относительно точки А звена рассчитывается по формуле …
1. ![]()
2. ![]()
3. ![]()
4. ![]()
- Степень подвижности планетарного зубчатого механизма ….
1. W=0
2. W=1
3. W>1
4. W<1
- При кинематическом исследовании механизма определяют ….
1. скорости
2. силы
3. моменты сил
- Диаграмму ускорений выходного звена механизма получают путем графического … диаграммы скоростей этого звена.
1. сложения ординат
2. дифференцирования
3. вычитания ординат
4. интегрирования
- Диаграмму скоростей выходного звена механизма получают путем графического… диаграммы ускорений этого звена.
1. сложения ординат
2. дифференцирования
3. вычитания ординат
4. интегрирования
- При кинематическом анализе механизма строят планы …..
1. скоростей
2. моментов сил
3. сил
- Точка кривошипа, вращающегося с угловой скоростью 10 с-1, которая отстоит от оси вращения на расстоянии 0,15 м, имеет линейную скорость .... м/c.
1. 15
2. 0,15
3. 1,5
- Угловая скорость коромысла, точка которого расположена от оси вращения на расстоянии 0,2 м и имеет линейную скорость 2 м/с, равна … с-1.
1. 0,4
2. 10
3. 0,1
- Воспроизведение практически любого закона движения выходного звена позволяют обеспечить ... механизмы.
1. кулисные
2. кривошипно-ползунные
3. храповые
4. кулачковые
- Примером пространственного механизма может служить …
1. кривошипно-ползунный механизм
2. механизм шарнирного четырехзвенника
3. коническая зубчатая передача
email: KarimovI@rambler.ru
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Теоретическая механика Сопротивление материалов
Прикладная механика Детали машин Строительная механика