Главная
Глоссарий
А
|
Автоматическая
линия |
совокупность
машин-автоматов, соединенных между собой автоматическими транспортными
устройствами и предназначенных для выполнения определенного технологического
процесса. |
|
Автооператор |
манипулятор, работающий по жесткой программе и
оперирующий штучными объектами по общему циклу машины. |
|
Аксоид |
геометрическое место положений мгновенных осей вращения в системе отсчета. |
|
часть линии зацепления зубчатой передачи, по которой происходит взаимодействие одного зуба с другим. |
|
|
Амортизатор |
элемент виброзащитной
системы, наиболее существенная часть которого – упругий элемент. |
|
Аналог
скорости |
первая производная от радиус-вектора точки звена по
обобщенной координате механизма:
|
|
Аналог
угловой скорости |
первая производная от угла поворота звена по обобщенной
координате механизма: |
|
Аналог
ускорения |
вторая производная от радиус-вектора точки звена по
обобщенной координате механизма: |
|
Аналог
углового ускорения |
вторая производная от угла поворота звена по обобщенной
координате механизма: |
Б
|
Балансировка ротора |
(уравновешивание ротора) определение значений и углов дисбалансов ротора и уменьшение их корректировкой масс. |
|
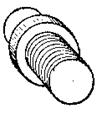
Балансировка статическая |
устранение неуравновешенности звена, вызванной наличием главного вектора силы инерции. Статической балансировке подвергаются звенья типа дисков (диаметр звена больше длины). |
|
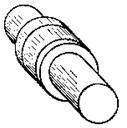
Балансировка динамическая |
устранение неуравновешенности звена, вызванной наличием главного момента сил инерции. Динамической балансировке подвергаются звенья типа валов (длина звена больше его диаметра). |
|
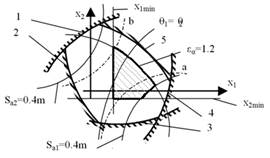
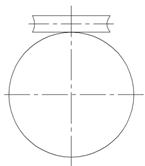
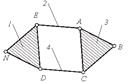
Блокирующий
контур |
область допустимых коэффициентов смещения зубчатых
колес передачи (на рисунке заштрихована).
|
В
|
Ведущее звено |
звено, для которого сумма элементарных работ внешних сил, приложенных к нему, положительна. Обычно ведущее звено совпадает с входным звеном, но в процессе движения одно и то же входное звено может быть ведущим или ведомым. Например, поршень в двигателе внутреннего сгорания при сгорании смеси – ведущее звено, но при всасывании и сжатии смеси, а также при выпуске отработанных газов – ведомое звено. |
|
Ведомое
звено |
звено, для которого сумма элементарных работ внешних
сил, приложенных к нему, отрицательна. Обычно ведомое звено
совпадает с выходным звеном, но в процессе движения одно и то же выходное
звено может быть ведомым или ведущим, например, колесо электровоза при
разгоне – ведомое звено, а при замедлении на ровном участке – ведущее звено
(двигатель, соединенный с колесом через редуктор превращается в генератор и
отдает энергию в сеть). |
|
Вибрация |
механические колебания тел. |
|
Виброзащита |
мероприятия по уменьшению колебаний механической системы. |
|
Вибропрочность |
способность объекта не разрушаться при механических воздействиях. |
|
Виллиса
теорема (теорема
зацепления) |
общая нормаль в точке контакта сопряженных профилей в любой момент зацепления должна проходить через полюс зацепления, положение которого на межосевой линии определяется заданным относительным движением звеньев. |
|
Винтовая
пара |
одноподвижная пара, допускающая винтовое движение
одного звена относительно другого. |
|
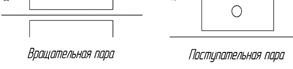
Вращательная пара |
одноподвижная пара, допускающая вращательное движение одного звена относительно другого. |
|
Водило |
звено Н, которое несет на себе ось сателлита.
|
|
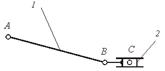
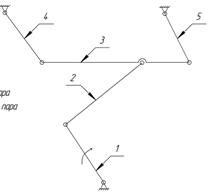
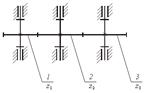
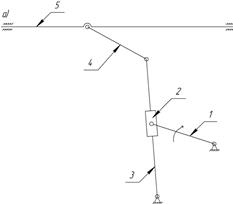
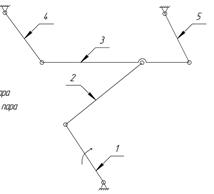
Входное
(ведущее) звено |
звено, которому сообщается движение, преобразуемое
механизмом в требуемые движения других звеньев. Входное звено соединено с
двигателем либо с выходным звеном другого механизма (звено 1).
|
|
Выходное
звено |
звено, совершающее движение, для выполнения которого
предназначен механизм. Выходное звено соединено с исполнительным устройством
(рабочим органом, указателем прибора), либо со
входным звеном другого механизма (звено 3)
|
|
Вычислительный
масштаб |
отношение действительного значения физической величины,
к длине отрезка, которым эта величина изображается на чертеже. |
Г
|
Гиперболоидные зубчатые передачи |
передачи с перекрещивающимися осями колес
|
|
Гидромашина |
энергетическая
машина, предназначенная для преобразования механической энергии твердого тела
в механическую энергию жидкости (или наоборот). |
|
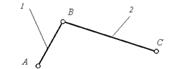
Группа
Ассура (структурная
группа) |
называется плоская кинематическая цепь,
присоединение которой к другой кинематической цепи не изменяет числа степеней
свободы последней, т. е. группа Ассура имеет
нулевую степень свободы. |
|
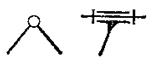
Группы
Ассура класс |
определяется числом внутренних кинематических пар,
образующих наиболее сложный замкнутый профиль. Примеры групп второго класса:
|
|
Группы
Ассура классификация
механизмов |
возможна, если выполняются следующие три
требования: – число ведущих звеньев равняется числу степеней свободы
механизма; – ведущее звено образует кинематическую пару с неподвижным
звеном; – все кинематические пары относятся к пятому классу. |
|
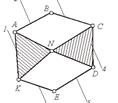
Группы
Ассура порядок |
определяется числом внешних кинематических пар, которыми
она может быть присоединена к другой кинематической цепи. Группа 2-го класса 2-го порядка:
Группа 4-го класса 2-го порядка:
|
Д
|
Двигатель |
техническое устройство, преобразующее один вид энергии в другой. Например, ДВС. |
|
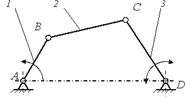
Двухкоромысловый механизм |
шарнирный четырехзвенный механизм, в состав которого входят два коромысла. Двухкоромысловый механизм служит для преобразования качательного движения одного коромысла в качательное движение другого коромысла. |
|
Двухкривошипный механизм |
шарнирный четырехзвенный механизм, в который входят два кривошипа. Двухкривошипный механизм служит для передачи и преобразования вращательного движения. За один оборот одного кривошипа другой кривошип совершает также один оборот. Равномерному вращению одного кривошипа соответствует обычно неравномерное вращение другого кривошипа. |
|
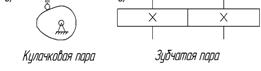
Двухподвижная пара |
кинематическая пара с двумя степенями свободы в относительном движении ее звеньев. Двухподвижными парами в плоских механизмах считают все высшие пары (зуб+зуб и кулачок+толкатель) |
|
Демпфер |
элемент виброзащитной системы рассеивающий энергию колебаний. |
|
Деталь |
элементарная часть механизма и машин, изготовленная
без применения сборочных операций. |
|
Динамика
машин |
раздел, изучающий методы определения сил, действующих на элементы механизма и машин в процессе их движения, а также устанавливает взаимосвязь между движением элементов и силами, действующими на них. |
|
Динамический
анализ |
определение движения звеньев механизма по приложенным к ним силам или определение сил по заданному движению при известных размерах, массах и моментах инерции звеньев. |
|
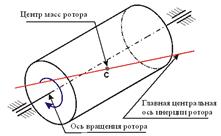
Динамическая
неуравновешенность |
Неуравновешенность центробежных сил инерции, возникающая оттого, что вращающиеся массы распределены неравномерно вдоль оси вращения (хотя центр тяжести всех масс может и лежать на оси). |
|
Динамическая
модель механизма |
представляет собой уравнение движения звена приведения, к которому приведены все силы и массы звеньев. |
|
Динамическая
схема механизма |
графическое изображение механизма с применением
условных обозначений звеньев и кинематических пар и с указанием размеров и других
характеристик звеньев, необходимых для динамического анализа. |
|
Динамический
виброгаситель |
устройство виброзащиты,
которое формирует дополнительные динамические воздействия в точках присоединения |
|
Динамический
гаситель с трением |
устройство динамического гашения колебаний, основанное
на повышении диссипативных свойств системы путем присоединения к объекту виброизоляции
дополнительных специальных демпфирующих элементов |
|
Динамический
гаситель инерционный |
устройство динамического гашения колебаний, основанное
на перераспределении колебательной энергии от объекта виброзащиты
к гасителю |
|
Динамический
синтез механизма |
определение параметров схемы механизма по заданным
динамическим свойствам. Целью динамического синтеза является проектирование кинематической
схемы механизма и выбор инерционных параметров с учетом его динамических
свойств. |
|
Дифференциальный
механизм |
эпициклический механизм, имеющий степень подвижности
больше единицы. |
|
Долбяк |
инструмент для нарезания зубчатых колес методом обкатки (огибания) как внутреннего, так и внешнего зацепления. |
З
|
Заменяющий механизм |
механизм с низшей парой, имеющий в определенном положении скорости и ускорения те же, что и соответствующий ему механизм с высшей парой. |
|
Замыкание
геометрическое |
соприкосновение элементов звеньев обеспечивается их
формами (цилиндрический шарнир, шаровой шарнир, ползун и кулиса). Характерно
для низших пар. |
|
Замыкание
силовое |
соприкосновение обеспечивается силой веса, силой
сжатия пружины и т.д. Характерно для высших пар. Высшие пары изнашиваются
сильнее, чем низшие, так как чем больше поверхности, тем меньше удельное
давление (давление на единицу площади). |
|
Заострение
зубьев |
цилиндрического эвольвентного зубчатого колеса с внешними зубьями называется пересечение эвольвент, образующих профили зубьев, на или внутри окружности вершин. |
|
Зацепление
зубчатое |
высшая кинематическая пара с последовательно взаимодействующими элементами двух звеньев. |
|
Зацепление
зубчатое модуль |
часть диаметра делительной окружности, приходящаяся на
один зуб (m). |
|
Звено
механизма |
одно или несколько жестко соединенных твердых тел,
входящих в состав механизма. Звенья различают входные (ведущие), выходные
(ведомые) и промежуточные. Звенья бывают жесткие. Звено может представлять собой
деталь (зубчатое колесо) или сборочную единицу (рычаг), состоящую из деталей,
не имеющих между собой относительного движения. Основные
виды звеньев: стойка, кривошип, коромысло, ползун, кулиса, кулачок, зубчатое
колесо. Кроме перечисленных жестких звеньев,
в механизмах применяют гибкие (цепи, ремни), упругие (пружины, мембраны) звенья,
а также жидкие и газообразные (масло, вода, газ, воздух и т.д.). Звенья обозначают цифрами, причем нумерация ведется
от ведущего звена, а стойке присваивается «ноль». |
|
Зуб |
выступ на звене для передачи движения посредством
взаимодействия с соответствующим выступом другого звена |
|
Зуба
ножка |
часть зуба, заключенная между делительной окружностью
и окружностью впадин (hII).
|
|
Зуба
головка |
часть зуба, заключенная между делительной окружностью
и окружностью выступов (hI).
|
|
Зуба
высота |
расстояние h между
окружностью вершин и окружностью впадин
|
|
Зубчатая
передача |
передаточный механизм, в котором подвижными звеньями
являются зубчатые колеса, образующие со стойкой или водилом
вращательные или поступательные пары, служащие для передачи движения и сил
путем непосредственного зацепления. |
|
Зубчатое
звено |
звено, имеющее один или несколько зубьев |
|
Зубчатое
колесо |
звено механизма, имеющее замкнутую систему зубьев,
обеспечивающее непрерывное движение другого звена. Меньшее из зубчатых колёс
(обычно ведущее) называется шестернёй, ведомое (обычно большее) – колесом. |
|
Зубчатые
колеса прямозубые |
колеса, у которых направление каждого зуба совпадает
с образующей начальной поверхности
|
|
Зубчатые
колеса косозубые |
колеса, у которых направление каждого зуба
составляет постоянный угол с образующей начальной поверхности
|
|
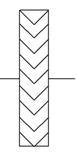
Зубчатые
колеса шевронные |
колеса, у которых зубчатый венец образуется из двух
рядов косых зубьев противоположного направления
|
|
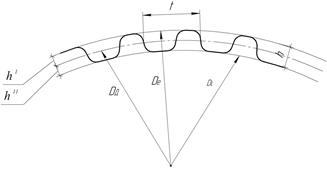
Зубчатого
колеса размеры |
1. Высота головки зуба hI = m 2. Высота ножки зуба hII =1,25m 3. Высота зуба h = 2,25m 4. Шаг зацепления t = πm 5. Диаметр делительной окружности Dд = mz 6. Диаметр окружности вершин зубьев Dе = m(z + 2) 7. Диаметр окружности впадин Di = m(z – 2,5) |
|
Зубчатый
механизм |
механизм, в состав которого входят зубчатые колеса. |
|
Зубчатый
механизм эпициклический |
зубчатые механизмы, в составе которых имеются подвижные
оси зубчатых колес |

И
|
Изнашивание |
процесс разрушения и отделения материала с поверхности твердого тела, проявляющийся в постепенном изменении размеров и формы тела; при этом могут изменяться и свойства поверхностных слоев материала (абразивное, механическое, усталостное, эрозионное). |
|
результат изнашивания в единицах длины, объема или массы. |
|
|
Интерференция
зубьев |
явление, заключающееся в том, что при рассмотрении теоретической картины зубчатого зацепления часть пространства оказывается одновременно занятой двумя взаимодействующими зубьями. |
|
Исполнительный
орган (звено) машины |
твердое
тело, выполняющее в технологических машинах заданные перемещения с целью
изменения или контроля формы, размеров и свойств обрабатываемого предмета. |
К
|
Карданная
передача |
механизм, состоящий из одного или нескольких карданных
валов и карданных шарниров и предназначенный для передачи крутящего момента
между агрегатами, оси которых не совпадают и могут изменять свое положение.
Для компенсации изменения расстояния между агрегатами трансмиссии в карданной
передаче используют подвижные в осевом направлении шлицевые муфты. Карданные шарниры можно разделить: - по кинематике на синхронные (равные угловые скорости)
и асинхронные (неравные угловые скорости); - по конструкции на полные, полукарданные
— жесткие (угол до 2°) и упругие (угол до 12°). |
|
Квазиплоский механизм |
пространственный механизм, по своей структуре не
имеющий избыточных контурных связей, однако элементы кинематических пар имеют
такое расположение в пространстве, при котором звенья совершают сложное движение,
достаточно близкое к плоскому движению, параллельному одной и той же
неподвижной плоскости. Это позволяет при расчете кинематических и кинетостатических параметров характеристик механизма
пользоваться с некоторыми допущениями двухмерными системами отсчета взамен
трехмерной системы отсчета. |
|
Кинематика |
изучает методы определения скоростей, ускорений
точек звеньев механизма, а также кинематическое проектирование механизмов по
заданным условиям. |
|
Кинематический
анализ механизма |
определение движения звеньев механизма по заданному
движению начальных звеньев. Основные задачи: - определение положений звеньев и траекторий отдельных
точек; - определение линейных скоростей и ускорений точек и
угловых скоростей и ускорений звеньев; - определение передаточных функций или отношений
между звеньями. Методы кинематического анализа: - графический – основан на
графическом дифференцировании и интегрировании; - аналитические – в общем
случае сложны и требуют громоздких вычислений. |
|
Кинематический
синтез механизма |
определение размеров его звеньев по заданным кинематическим
свойствам. |
|
Кинематическая
диаграмма |
называется кривая в прямоугольной системе координат,
представляющая зависимость какого-либо параметра движения звена от времени
или угла поворота ведущего звена. |
|
Кинематическая
схема механизма |
называется графическое изображение механизма с применением
условных обозначений звеньев и кинематических пар и с указанием размеров, необходимых
для кинематического анализа. |
|
Кинематическая
пара |
соединение двух соприкасающихся звеньев, допускающее
их относительное движение (или подвижное соединение двух звеньев). Кинематические
пары обозначают заглавными латинскими буквами (A,B,C,D и т.д.).
|
|
Кинематическая
пара начальная |
пара, звеньям которой приписывается одна или несколько
обобщенных координат механизма. |
|
Кинематическая
пара одноподвижная |
кинематическая пара с
одной степенью свободы в относительном движении ее звеньев. |
|
Кинематическая
пара приводная |
кинематическая пара, в которой звенья перемещаются
принудительно посредством привода, смонтированного на них. |
|
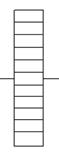
Кинематическая пара высшая |
кинематическая пара, в которой элементом соприкосновения двух звеньев являются точка или линия.
|
|
Кинематическая
пара низшая |
кинематическая пара, в которой элементом соприкосновения двух звеньев является поверхность.
|
|
Кинематическая
поступательная пара винтовая |
одноподвижная пара, допускающая винтовое движение одного звена относительно другого. Число связей – 5, число степеней свободы –
1, 1Ви (Ви)
|
|
Кинематическая
поступательная пара вращательная |
одноподвижная пара, допускающая вращательное движение одного звена
относительно другого. Число связей – 5, число степеней свободы – 1, 1В (В)
|
|
Кинематическая
пара плоскостная |
трехподвижная пара, допускающая плоское движение одного звена относительно другого. Число связей – 3, число степеней свободы – 3, 3Пл (Пл)
|
|
Кинематическая
пара поступательная |
одноподвижная пара, допускающая прямолинейно – поступательное
движение одного звена относительно другого. Число связей – 5, число степеней свободы – 1, 1П (П)
|
|
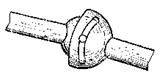
Кинематическая
пара сферическая |
трехподвижная пара, допускающая сферическое движение одного звена относительно
другого. Число связей – 3, число степеней свободы – 3, 3С (С)
|
|
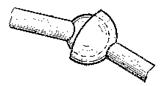
Кинематическая
пара сферическая с пальцем |
двухподвижная пара, допускающая сферическое движение одного звена относительно
другого. Число связей – 4, число степеней свободы – 2, 2Сп (Сп)
|
|
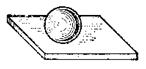
Кинематическая
пара шар-плоскость |
Число связей – 1, число степеней свободы - 5
|
|
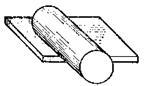
Кинематическая
пара цилиндр-плоскость |
Число связей – 2, число степеней свободы – 4
|
|
Кинематическая
пара цилиндрическая |
двухподвижная пара, допускающая вращательное и поступательное (вдоль оси вращения)
движения одного звена относительно
другого. Число связей – 4, число степеней свободы – 2, 2Ц (Ц)
|
|
Кинематической
пары элемент |
совокупность поверхностей, линий и отдельных точек
звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую
пару. |
|
Кинематической
пары класс |
число связей, наложенных на относительное движение
звеньев кинематической пары. В плоских механизмах подвижность пары не
связана однозначно с ее классом. |
|
Кинематическая
цепь |
система звеньев, связанных между собой кинематическими парами. |
|
Кинематическая
цепь открытая |
называется кинематическая цепь, звенья которой
входят только в одну кинематическую пару.
|
|
Кинематическая
цепь замкнутая |
называется кинематическая цепь, каждое звено которой
входит не менее чем в две кинематические пары.
|
|
Кинематическая
цепь простая |
называется кинематическая цепь, в которой все звенья
входят не более чем в две кинематические пары.
|
|
Кинематическая
цепь сложная |
называется кинематическая цепь, звенья которой входят
в три и более кинематические пары.
|
|
Кинематическая
цепь определенная |
кинематическая цепь, в которой закон движения ведомых
звеньев можно определить по закону движения ведущих. |
|
Кинематическая
цепь неопределенная |
кинематическая цепь, в которой закон движения ведомых
звеньев нельзя определить по закону движения ведущих. |
|
Кинематическая
цепь плоская |
кинематическая цепь, в которой точки звеньев описывают
траектории, лежащие в параллельных плоскостях. |
|
Кинематическая
цепь пространственная |
кинематическая цепь, в которой точки звеньев описывают
неплоские траектории, или траектории лежащие в пересекающихся
плоскостях. |
|
Кинематическое
соединение |
кинематическая цепь с числом звеньев более двух, эквивалентная
заменяющей кинематической паре, но отличающаяся по своей конструкции. |
|
Кинетическая
энергия механизма |
сумма кинетических энергий его звеньев. У звена, совершающего
поступательное движение, кинетическая энергия Звено, совершающее вращательное движение, имеет кинетическую
энергию J – момент инерции звена относительно оси
вращения; m –
масса звена; v – скорость звена; ω –
угловая скорость звена. |
|
Кинетостатика |
раздел механики, изучающий движение с помощью уравнений
движения, записанных в форме уравнений статики с использованием принципа Даламбера. |
|
Кинетостатический расчет |
силовой расчет механизма, основанный на применении
принципа Даламбера. |
|
Класс
кинематической пары |
число связей, наложенных на относительное движение звеньев. |
|
Колебания
периодические |
возникают в механизмах и машинах, в которых силы,
действующие на звенья, изменяются в определенной зависимости от угла поворота
ведущего звена. К таким машинам относятся двигатели внутреннего сгорания, паровые
машины, поршневые насосы и др. Периодические колебания регулируются при
помощи маховика. |
|
Колебания
непериодические |
возникают в результате случайного изменения сил полезных
сопротивлений. Такие колебания регулируются центробежными регуляторами. |
|
Конические
зубчатые передачи |
передачи с пересекающимися осями колес
|
|
Контур |
линия, очерчивающая расположение звеньев в механизме.
Механизм может содержать один или несколько замкнутых или незамкнутых контуров. |
|
Контур
механизма векторный |
контур, составленный из геометрических векторов, связанных
со звеньями механизма. |
|
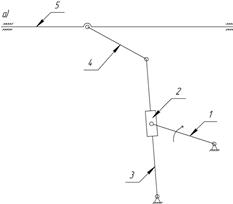
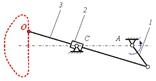
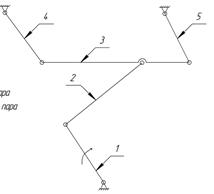
Коромысло
(редко: рычаг) |
вращающееся звено рычажного механизма, которое может совершать только неполный оборот вокруг неподвижной оси (звено 4 и 5).
|
|
Коронная
шестерня Коэффициент
неравномерности Коэффициент
удельного давления Коэффициент
удельного скольжения |
центральное колесо, имеющие внутренние зубья. отклонения угловой скорости от среднего уровня. характеризует величину контактных напряжений, возникающих в местах соприкосновения зубьев. характеризует износостойкость зубчатой передачи в высшей КП. |
|
Коэффициент
неравномерности движения механизма |
отношение разности максимального и минимального значений
обобщенной скорости механизма к ее среднему значению за один цикл установившегося
движения механизма. |
|
Коэффициент
перекрытия |
характеризует непрерывность и плавность зацепления в зубчатой передаче. |
|
Коэффициент
скольжения |
характеризует величину проскальзывания сопряженных профилей зубчатых колес в процессе зацепления |
|
К.П.Д.
цикловой механизма (𝜼) |
отношение полезной работы к работе движущих сил за цикл установившегося движения η=1-ψ, где ψ- коэффициент потерь равный отношению работы сил вредного сопротивления к работе движущих сил η=Апс/Ад. |
|
К.П.Д.
мгновенный механизма |
отношение мощности внешних сил на ведомом звене к мощности внешних сил на ведущем звене. |
|
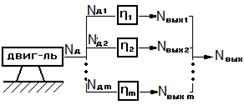
К.П.Д.
общий последовательных механизмов |
равен произведению К.П.Д. отдельных механизмов η=η1η2…ηm.
|
|
К.П.Д.
общий параллельных механизмов |
равен:
|
|
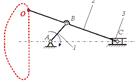
Кривошип
(иногда: коленчатый вал, коленвал, эксцентрик, водило) |
вращающееся звено рычажного механизма, которое может совершать полный оборот вокруг неподвижной оси (звено 1).
|
|
Кривошипно-коромысловый
механизм |
шарнирный четырехзвенный механизм, в состав которого входит кривошип и коромысло.
|
|
Кривошипно-ползунный
(кривошипно-шатунный) механизм |
рычажный четырехзвенный механизм, в состав которого входят кривошип и ползун. Кривошипно-ползунный механизм служит для преобразования вращательного движения кривошипа в возвратно-поступательное движение ползуна или, наоборот, возвратно-поступательного движения ползуна во вращательное движение кривошипа.
1 звено – кривошип; это звено, прикреплённое к
стойке, совершает полный оборот вокруг неё. 2 звено – коромысло; это звено совершает
колебательные движения относительно стойки. 3 звено – шатун; шарнирно связанно с неподвижными
звеньями, и совершает плоскопараллельное движение (ползун, поршень). 4 звено – стойка. |
|
Кривошипно-кулисный
механизм |
рычажный четырехзвенный механизм, в состав которого входят кривошип и кулиса. Кривошипно-кулисный механизм служит для передачи и преобразования вращательного движения кривошипа во вращательное или качательное движение кулисы и, наоборот, движение кулисы во вращение кривошипа. |
|
Кулачок |
звено, имеющее элемент высшей пары, выполненный в виде поверхности переменной кривизны. |
|
Кулачковый
механизм |
трехзвенный механизм с высшей кинематической парой,
в состав которого входит кулачок (входное звено, рабочая поверхность которого
имеет переменную кривизну) и толкатель (коромысло, выходное звено).
|
|
Кулачковый
механизм позиционный |
кулачковый механизм, предназначенный для перевода ведомого звена из одного положения в другое. |
|
Кулачковый
механизм функциональный |
кулачковый механизм, предназначенный для воспроизведения заданного закона движения ведомого звена. |
|
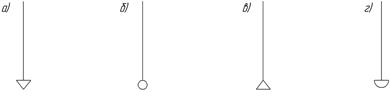
Кулачковых
механизмов классификация |
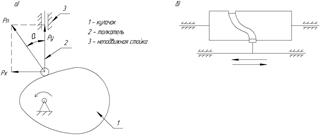
1. В зависимости от вида относительного движения звеньев: а) плоские (кулачок и
толкатель перемещаются в параллельных плоскостях) (рис. 1,а); б) пространственные
(кулачок и толкатель перемещаются в непараллельных плоскостях) (рис. 1,б).
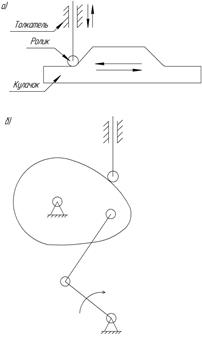
Рис.1 2. По видам движения кулачка: а) с поступательно движущимися кулачками (рис. 2,а); б) с вращающимися кулачками (рис. 1,а); в) с качающимися кулачками (рис. 2,б).
Рис. 2 3. В зависимости от характера движения толкателя: а) возвратно-поступательные; б) колебательные; в) сложные. 4. По профилю рабочей поверхности толкателя: а) остроконечный (рис. 3,а); б) роликовый (рис. 3,б); в) плоский (рис. 3,в); г) сферический (рис. 3,г).
Рис. 3 5. В
зависимости от типа кулачка: а) дисковые (рис. 1,а); б) пазовые (рис. 1,б). 6. В зависимости от расположения оси толкателя и центра
вращения кулачка: а) центральные (рис. 1,а); б) дезаксиальные (рис. 2,б). |
|
Кулачковый
распределительный вал |
система кулачков с одним общим валом, предназначенная
для согласованной работы нескольких выходных звеньев. Каждый кулачок имеет
определенный угол установки начальной прямой относительно кулачка, принятого
за базовый. |
|
Кулиса |
подвижное звено механизма, имеющее направляющие, вращающееся вокруг неподвижной оси и образующее с другим подвижным звеном поступательную пару (звено 3).
|
|
Кулисный
механизм |
1 – кривошип; 2 – камень кулисы (втулка) вместе с 3 совершает
полный оборот вокруг А (ω1 и ω2 одно и
тоже), а также движется вдоль звена 3 приводя его во вращение; 3 – кулиса, неподвижная направляющая для камня. |












Л
|
траектория точки контакта профилей в ее абсолютном движении (т.е. в движении по отношению к неподвижному звену зубчатой передачи). |
М
|
формула определения степени подвижности пространственной кинематической цепи W6= 6n - (5P1+4P2+3P3+2P4+1P5), где n-количество звеньев кинематической цепи; P1,P2,P3,P4,P5- число одно, двух трех, четырех- и пяти-подвижных кинематических пар в кинематической цепи. |
|
|
Манипулятор |
устройство, дистанционно управляемое оператором и программным устройством, содержащее рабочий орган, который предназначен для имитации перемещений и рабочих функций кисти руки человека. |
|
Масштабный
коэффициент |
отношение численного значения физической величины в свойственных ей единицах к длине отрезка в миллиметрах, изображающего эту величину. |
|
Маховик |
вращающееся тело, характеризующееся добавочным моментом инерции и предназначенное для уменьшения коэффициента неравномерности движения механизма. Маховик выполняют в виде массивного сплошного диска или шкива с тяжелым ободом и спицами. Маховик аккумулирует энергию при увеличении угловой скорости и отдает ее при уменьшении скорости.
|
|
Машина |
устройство, выполняющее механические движения для преобразования энергии, материалов и информации с целью замены или облегчения физического и умственного труда человека. |
|
Машина-автомат |
машины, совершающие технологический процесс и связанные с ним транспортные операции без участия человека. |
|
Машина-двигатель |
энергетическая машина, предназначенная для преобразования энергии любого вида в механическую энергию твердого тела. |
|
Машина-генератор |
энергетическая машина, предназначенная для преобразования механической энергии твердого тела в энергию любого вида. |
|
Машина
информационная |
машина для
получения и преобразования информации. |
|
Машина
технологическая |
машина,
предназначенная для преобразования обрабатываемого предмета, состоящего в
изменении его размеров, формы, свойств или состояния. |
|
Машина
транспортная |
машина, предназначенная
для перемещения людей и грузов. |
|
Машина
энергетическая |
машина,
предназначенная для преобразования энергии. |
|
Машинный
агрегат |
техническое объединение двигателя и технологической (рабочей машины). |
|
Метод
обращения движения |
метод проектирования и исследования механизма, при
котором одно подвижное звено условно (мысленно) считается неподвижным при сохранении
относительных движений всех других звеньев, входящих в состав механизма,
включая и стойку, которая становится подвижным звеном. |
|
Метод
замкнутых векторных контуров |
заключается в следующем: - звенья механизма изображают в виде векторов,
которые образуют на схеме механизма один или несколько замкнутых векторных
контуров (в соответствии с количеством групп Ассура); - складывают векторные уравнения замкнутости каждого
контуру; - выбирают прямоугольную систему координат и проектируют
уравнение замкнутости контуров на осе выбранной системы координат. В результате
получают аналитические зависимости положения звеньев от обобщенных координат
механизма и его размеров, то есть функцию положений звеньев механизма; - дифференцируют дважды по времени уравнение замкнутости
контуров в проекциях на осе x, y и получают, соответственно, систему уравнений
для определения скоростей и ускорений звеньев механизма. Если дифференцируют
по обобщенной координате — получают, соответственно, уравнения для определения
аналогов скоростей и ускорений. - определяют координаты, проекции скоростей и ускорений характерных точек механизма. Определяют модули скоростей и ускорений этих точек. |
|
Механизм |
искусственно созданная замкнутая кинематическая цепь,
в которой при заданном движении одного или нескольких звеньев относительно любого из
них все остальные звенья совершают однозначные движения или система тел, предназначенная для
преобразования движения одних тел (одного или нескольких) в требуемое
движение других. Например: механизм подачи заготовок, механизм сцепления, механизм торможения и т.д. |
|
Механизм
1 класса |
простой механизм, состоящий из одного подвижного звена, образующего с неподвижным звеном низшую кинематическую пару
|
|
Механизм
гидравлический |
называется механизм, в котором преобразование
движения происходит посредством как твердых тел, так
и жидкости. |
|
Механизм
пневматический |
в случаях, когда промежуточной средой является газ,
речь идет о пневматических механизмах. Тогда насос заменяется
на источник сжатого воздуха, а вместо соединения с резервуаром,
выполняется выход в атмосферу. |
|
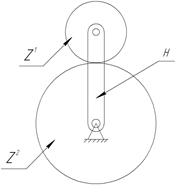
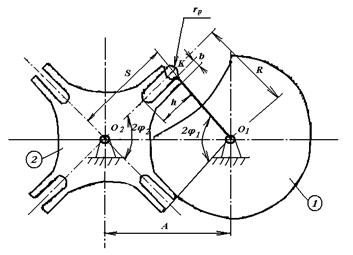
Механизм
мальтийский |
это механизм, предназначенный для преобразования
непрерывного движения звена 1 (кривошип) во вращательное движение звена 2
(мальтийский крест) с периодическими остановками (см.рис.). Обычно мальтийский крест имеет от 4 до 20
пазов, а также один или два кривошипа. Конструктивно звено 1 состоит из двух
деталей: кривошипа с роликом и запорной шайбы. Звено 1 совершает непрерывное вращательное движение,
при этом один оборот звена имеет две фазы движения: рабочий ход и холостой
ход. Во время рабочего хода кривошип звена 1 поворачивает на определенный
угол мальтийский крест, а во время холостого хода мальтийский крест должен
быть неподвижен, что обеспечивается запорной шайбой.
|
|
Механизм
передаточный |
механизм, обеспечивающий воспроизведение заданной
функциональной зависимости между перемещениями входных и выходных звеньев. Примеры передаточных механизмов (зубчатый и планетарный):
|
|
Механизм
точный направляющий |
механизм, в котором траектория некоторой точки
звена, образующего кинематические пары только с подвижными звеньями, точно совпадает
с заданной кривой на отдельном участке или на всем ее протяжении. Примеры точных прямолинейно-направляющих механизмов:
|
|
Механизм
приближенный направляющий |
механизм, в котором траектория некоторой точки
звена, образующего кинематические пары только с подвижными звеньями, мало
отличается от заданной кривой на отдельном участке или на всем ее протяжении. |
|
Механизм
фрикционный |
механизмы, в которых для передачи движения между
соприкасающимися звеньями используется трение. Существуют фрикционные механизмы
с постоянным и регулируемым
передаточным отношением. |
|
Модуль
зубьев |
линейная величина в π раз меньше шага зубьев. |
|
Момент
инерции звена |
мера инертности звена во вращательном движении, равная сумме произведений масс частиц тела на квадраты их расстояний до плоскости, оси или точки. |
|
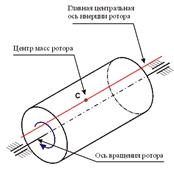
Моментная
неуравновешенность |
характеризуется тем, что центр масс ротора расположен на оси его вращения, главная центральная ось инерции повернута относительно оси вращения на некоторый угол γ. |
|
Мультипликатор |
повышающая передача, включающая в себя систему взаимодействующих колес, заключенных в единый корпус. |



Н
О
|
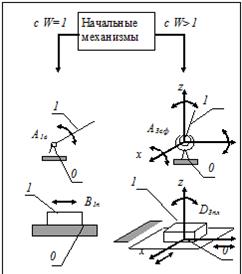
Обобщенные
координаты |
совокупность координат, независимых друг от друга и
полностью определяющих положение всех звеньев механизма в любой момент времени. Число обобщенных координат равно числу подвижностей
механизма. В качестве обобщенных координат могут служить любые переменные координаты,
определяющие положение звеньев. Примеры обобщенных координат:
а б в а – механизм с одной подвижностью и угловой обобщенной координатой; б – механизм с одной подвижностью и линейной обобщенной координатой; в– механизм с двумя
подвижностями, имеющий два начальных звена |
|
Огибания способ (нарезание
зубчатых колес) |
способ формообразования зубьев зубчатых колес, при котором боковые поверхности зубьев образуются как огибающие последовательных положений режущей кромки зуборезного инструмента (червячной фрезы, долбяка, зуборезной гребенки). |
|
Одноподвижная
пара |
кинематическая пара с одной степенью свободы в относительном движении ее звеньев. Одноподвижными являются поступательная, вращательная и винтовая пары. |
|
Окружность
вершин |
окружность наибольшего диаметра (проходящая через вершины зубьев) De
|
|
Окружность
впадин |
окружность, ограничивающая тело зубчатого колеса от стороны его зубьев Di
|
|
Окружность
делительная |
окружность, которая делит зуб на две части (Dд)
|

П
|
отношение угловой скорости ведущего звена к угловой
скорости ведомого звена (i) |
|
|
Передаточное
отношение зубчатой передачи ijk |
называется отношение угловой скорости j-го зубчатого колеса к угловой скорости k-го зубчатого колеса |
|
Питч |
отношение числа зубьев колеса к делительному диаметру в дюймах (используется вместо модуля зубьев в странах с дюймовой системой мер). |
|
План
положений механизма |
графическое изображение взаимного расположения
звеньев механизма в определенный момент времени. |
|
План
скоростей звена |
называется графическое построение, представляющее собой
плоский пучок, лучи которого изображают абсолютные скорости точек звена плоского
механизма, а отрезки, соединяющие концы лучей, – относительные скорости
соответствующих точек при данном положении звена. |
|
План
скоростей механизма |
называется совокупность планов скоростей звеньев механизма
с одним общим полюсом. |
|
Плана
скоростей свойства |
– фигура на плане скоростей, образованная векторами относительных
скоростей, подобна фигуре на звене, образованной отрезками, соединяющими
соответствующие точки; – план скоростей дает возможность находить угловую
скорость звена. Для этого нужно относительную скорость между любыми двумя точками,
лежащими на одном звене, разделить на расстояние между этими точками:
– по плану скоростей можно найти положение мгновенного
центра скоростей звена, т. е. точки на звене, скорость которой в данный
момент равна нулю; – на плане скоростей можно найти направления касательных
и нормалей к траекториям точек без построения самих траекторий. |
|
План
ускорений звена |
называется графическое построение, представляющее собой
плоский пучок, лучи которого изображают абсолютные ускорения точек звена плоского
механизма, а отрезки, соединяющие концы лучей, – относительные ускорения
соответствующих точек при данном положении звена. |
|
План
ускорений механизма |
называется совокупность планов ускорений звеньев механизма
с одним общим полюсом. |
|
Плана
ускорений свойства |
– фигура на плане ускорений, образованная векторами
относительных ускорений, подобна фигуре на звене, образованной отрезками, соединяющими
соответствующие точки; – план ускорений позволяет определять угловые ускорения
звеньев. Для этого необходимо относительное касательное ускорение между любыми
двумя точками звена разделить на расстояние между этими точками:
– по плану ускорений можно найти положение мгновенного
центра ускорений звена, т. е. точку на звене, ускорение которой в данный
момент равно нулю; – план ускорений дает возможность находить радиусы
кривизны траекторий без их построения. |
|
Планетарный
механизм |
называется эпициклический механизм, имеющий в своем составе хотя бы одно звено с подвижной геометрической осью в пространстве и степень подвижности равным 1. |
|
Плоский
механизм |
механизм, точки звеньев которого описывают траектории, лежащие в параллельных плоскостях. |
|
Плоскостная
пара |
трехподвижная пара,
допускающая плоское движение одного звена относительно другого. |
|
Пневмомашина |
энергетическая
машина, предназначенная для преобразования механической энергии твердого тела
в механическую энергию газа (или наоборот). |
|
Поверхность
зуба боковая |
поверхность, ограничивающая зуб со стороны впадины. |
|
Поводок |
звено, входящее в группе в две кинематические пары, одна из которых свободная и служит для присоединения к одному из подвижных звеньев механизма или к стойке. |
|
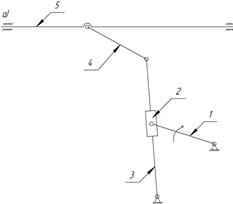
Подвижность
кинематической пары |
число степеней свободы в относительном движении ее
звеньев. Различают одно-, двух-, трех-, четырех- и пятиподвижные кинематические пары. |
|
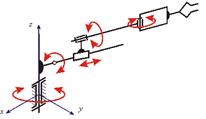
Подвижности
механизма |
это независимые возможные перемещения его звеньев. Число
подвижностей механизма и число степень свободы механизма синонимы. Подвижность разомкнутой кинематической цепи равна
сумме подвижностей, допускаемых ее кинематическими парами (манипулятор,
приведенный на рисунке имеет 5 подвижностей).
Число подвижностей плоских механизмов W=3n-2pн-2pв где n –число
подвижных звеньев pн – число
низших кинематических пар в механизме pв – число высших кинематических
пар в механизме. Число подвижностей пространственных механизмов W=6n-5p5-4p4-3p3-2p2-p1 где pi – число кинематических пар i-класса в
механизме, i=1, 2, …5. |
|
Подвижность
механизма местная |
подвижность одного звена, не влияющая на перемещения
других звеньев. Пример – подвижность ролика 3 толкателя 2 кулачкового механизма.
|
|
Подрезание
ножки зуба |
срезание части номинальной поверхности у основания зуба обрабатываемого зубчатого колеса в результате интерференции зубьев при станочном зацеплении. |
|
Полезная
работа механизма |
работа движущих сил за вычетом работы, затраченной
на преодоление сил вредного сопротивления в механизме. |
|
(поршень – в двигателях и компрессорах, толкатель – в кулачковых механизмах, суппорт – в станках, кулисный камень) – звено образующее поступательную пару с неподвижным другим звеном (чаще всего со стойкой) (звено 5).
|
|
|
Полное
уравновешивание плоского механизма |
производится с помощью противовесов, подобранных и
установленных так, чтобы сумма сил инерции всех звеньев (включая и силы инерции
противовесов) и сумма моментов этих сил относительно любой точки равнялись бы
нулю. |
|
Полюс
зацепления (зубчатой передачи) |
точка или одна из точек касания начальных поверхностей зубчатых колес передачи. |
|
Поступательная
пара |
одноподвижная пара, допускающая прямолинейно-поступательное движение одного звена относительно другого. |
|
Приведенная
масса mпр |
масса, сосредоточенная в одной точке (называемой точкой
приведения), кинетическая энергия которой равна кинетической энергии механизма:
|
|
Приведенный
момент инерции механизма |
момент инерции, которым должно обладать одно из звеньев механизма (звено приведения) относительно оси вращения, чтобы кинетическая энергия этого звена равнялась сумме кинетических энергий всех звеньев.
где
|
|
Приведенный
момент сил |
момент сил, условно приложенный к звену приведения и определяемый из условия равенства его элементарной работы (мощности) сумме элементарных работ (мощностей) сил и моментов сил, действующих на звенья механизма. |
|
Приведенная
сила |
сила условно приложенная к точке приведения и определяемая
из условия равенства ее элементарной работы (мощности) сумме элементарных
работ (мощностей) сил и моментов сил, действующих на звенья механизма. Различают «приведенную движущую силу»,
«приведенную силу сопротивления», «приведенную силу инерции» и др. |
|
Приведенная
пара сил |
пара сил,
условно приложенная к одному из звеньев механизма (звену приведения) и
определяемая из равенства элементарной работы этой пары сил сумме
элементарных работ сил и пар сил, действующих на звенья механизма. Различают «приведенную пару движущих сил», «приведенную пару сил
сопротивления», «приведенную пару сил инерции» и др. |
|
Привод
машины |
система,
состоящая из двигателя и связанных с ним устройств для
приведения в движение одного или нескольких твердых тел, входящих в состав
машины. |
|
Принцип
Даламбера |
при движении механической системы активные силы, реакции
связей и силы инерции образуют равновесную систему сил в любой момент движения. |
|
Принцип
освобождаемости от связей |
замена действия связей реакциями связей при составлении
кинетостатических уравнений движения механизма. |
|
Программа
машины |
совокупность
предписаний, обеспечивающих выполнение технологического процесса в машине. |
|
Производящий
исходный контур |
проекция режущей грани инструмента на плоскость, перпендикулярную оси вращения заготовки. |
|
Промышленный
робот |
манипулятор с изменяемой программой, представляющий
собой автономно функционирующую машину-автомат, предназначенную для воспроизведения
некоторых двигательных и умственных функций человека при выполнении
вспомогательных и основных производственных операций. |
|
Пространственный
механизм |
механизм, точки звеньев которого описывают пространственные траектории или траектории, лежащие в пересекающихся плоскостях. |
|
Профили
сопряженные |
профили, обеспечивающие заданное угловое передаточное отношение. |
|
Профиль
зуба |
линия пересечения боковой поверхности зуба с плоскостью, перпендикулярной к оси вращения колеса |


Р
|
кратчайшее расстояние между осями вращения колес. |
|
|
Расчет
кулачка |
расчет координат центрового или конструктивного профиля
кулачка по заданному закону движения толкателя с учетом ограничений, накладываемых
на параметры механизма, например, конструктивные ограничения, ограничения
величины углов давления и др. |
|
Реакции
связей |
силы, учитывающие эффект действия связей и действующие
на материальные точки механической системы со стороны материальных тел, осуществляющих
связи, наложенные на эту систему. |
|
Редуктор зубчатый |
понижающая передача, обычно включающая в себя систему взаимосвязанных звеньев, заключенных в единый корпус. При использовании в редукторе зубчатых передач называется зубчатый редуктор. |
|
Режим
разбега механизма |
переходное движение между покоем и установившимся
движением механизма. Условие существования режима разбег: Ад>|Ас|. |
|
Режим
выбега механизма |
переходное движение между установившимся движением
механизма и покоем. Условие существования режима выбега: Ад<|Ас|. |
|
Режим
установившегося движения механизма |
движение при котором кинетическая энергия механизма постоянна или является периодической функцией времени. Условие существования установившегося движения: Ад=|Ас|. Ад - работа движущих сил; Ас - работа сил сопротивления. |
|
резкое возрастание амплитуды установившихся вынужденных колебаний системы, когда частота внешнего взаимодействия на систему приближается к какой-либо частоте ее собственных колебаний. |
|
|
Рейка |
Зубчатое колесо с теоретически бесконечно большим количеством зубьев. Как привило, их бывает 8. |
|
Робот |
машина с антропоморфным (человекоподобным) поведением, которая частично или полностью выполняет функции человека при взаимодействии с окружающим миром. |
|
Ротор |
тело любой геометрической формы, имеющее свое основное движение – движение вращения (коленвал, колесо турбины и т.д.) и опирающееся на две опоры. |
|
Рычаг
Жуковского |
воображаемый рычаг переменной конфигурации, фигура
которого в каждом положении механизма
подобна плану скоростей, повернутому на |
|
Рычажный
механизм |
механизм, звенья которого образуют только вращательные, поступательные, цилиндрические и сферические пары. Примерами рычажного механизма являются кривошипно-ползунный механизм, кулисный механизм и др.
|
С
|
явление, при котором из-за сил трения относительное движение звеньев не может начаться, как бы ни велики были движущие силы. |
|
|
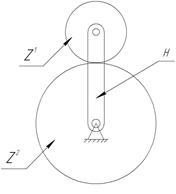
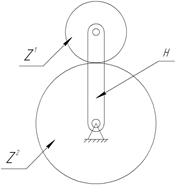
Сателлит |
зубчатое колесо z1 планетарной передачи с подвижной осью вращения. Сателлит одновременно вращается вокруг своей оси и совершает движение вместе с водилом.
|
|
Связи |
ограничения, налагаемые на положения и скорости твёрдого
тела или материальной точки, которые должны выполняться при любых действующих на механическую
систему силах. Всякую связь можно отбросить и заменить силой-реакцией связи
или системой сил в общем случае. Связи в механизмах осуществляются с помощью
элементов контактирующих звеньев в кинематической паре, гибких элементов, магнитного
поля и т .д. |
|
Связи
избыточные |
это связи, устранение которых не изменяет
подвижность механизма. Отклонения в расположении связей компенсируются деформациями
звеньев, износом контактирующих поверхностей, зазорами между элементами пар,
повышенной точностью изготовления и сборки звеньев, кромочным контактом
элементов пар. Структурная схема механизма без избыточных связей называется основной схемой. Количество избыточных связей в пространственном механизме: q=(W+5p5+4p4+3p3+2p2+p1)-6n где W- число
подвижностей pi – число кинематических пар i-класса в
механизме, i=1, 2, …5 n- число подвижных звеньев. |
|
Солнечное
(центральное) зубчатое колесо |
зубчатое колесо z2, вокруг оси которого вращается сателлит
|
|
Сила
приведенная |
сила, условно приложенная к одной из точек
механизма, работа которой на ее элементарном перемещении равна сумме работ
всех реальных сил на их элементарных перемещениях. |
|
Сила
уравновешивающая |
сила, равная приведенной,
но противоположно направленная. |
|
Силы движущие |
силы, приложенные к ведущему звену механизма и совершающие
механическую работу. |
|
Силы
инерции |
силы обратного воздействия ускоряемого тела на тела, вызывающие его ускорение Ри = –mа, где m – масса тела; а – ускорение центра тяжести. |
|
Силы
вредного сопротивления |
силы, приложенные к звеньям механизма и совершающие отрицательную работу (не являющуюся работой полезных сопротивлений, которая также отрицательна). Силы вредных сопротивлений делятся на силы трения и силы сопротивления среды. |
|
Силы
полезного сопротивления |
силы сопротивления, совершающие работу, требуемую от
механизма. |
|
Силы
сопротивления |
это те силы из числа приложенных к звеньям
механизма, которые стремятся замедлить движение ведущего звена, их
элементарная работа отрицательна. Различают силы полезного и вредного сопротивления. |
|
Силы
реактивные (реакции) |
силы, возникающие в кинематических парах и представляющие
собой давление звеньев друг на друга. |
|
Силы
тяжести |
вес самой машины и вес ее звеньев. |
|
Силы
трения |
сопротивление, возникающее на поверхности двух соприкасающихся
тел при относительном их движении. Сопротивление возникает в результате
шероховатости соприкасающихся тел, в зоне фактического контакта происходит
сцепление, возникают упругие, вязкие и пластические деформации, развиваются
силы молекулярного взаимодействия. По видам относительного движения различают: трение скольжения (в высших и низших
кинематических парах) и трение качения
(в высших парах). |
|
Силовой
анализ механизма |
определение реактивных и движущих сил |
|
Синтез
механизма |
проектирование схемы механизма по заданным его свойствам. Синтез включает в себя выбор структурной схемы и определение постоянных параметров выбранной схемы механизма по заданным его свойствам. Различают: структурный синтез механизмов – выбор его схемы; метрический синтез – нахождение размеров звеньев и динамический синтез – распределение масс звеньев. |
|
Синтез
механизма по Чебышеву |
синтез механизмов по методу наилучшего равномерного
приближения функций. |
|
Синтез
рычажных механизмов |
осуществляется последовательным присоединением групп
Ассура к начальному механизму. Проводят по - требуемым
положениям звеньев (максимальное число задаваемых положений не более 5); - средней скорости движения выходного звена; - коэффициенту изменения средней скорости
выходного звена. |
|
Синтез
динамический |
проектирование кинематической схемы механизма с учётом
его динамических свойств, в том числе
и распределения масс звеньев. |
|
Синтез
кинематический |
проектирование кинематической схемы механизма. |
|
Синтез
структурный |
проектирование структурной схемы механизма. |
|
Система
управления машины |
система,
обеспечивающая согласованность перемещений всех исполнительных органов в
соответствии с заданной программой машины. |
|
Смещение
исходного контура |
это кратчайшее расстояние между средней линией рейки
и делительной окружностью нарезаемого колеса. В зависимости от величины коэффициента смещения
различают три вида зубчатых колес: нулевое
колесо (х=0) для него толщина
зуба по делительной окружности = ширине впадины; положительное
(х>0) колесо для него толщина
зуба по делительной окружности > ширины впадины; отрицательное
(х<0) колесо для него толщина
зуба по делительной окружности < ширины впадины. |
|
Солнечное
колесо |
центральное колесо, имеющее внешние зубья. |
|
Сопряженные
поверхности |
поверхности, которые постоянно или с определенной периодичностью
входят в зацепление друг с другом. |
|
Станочное
зацепление |
зацепление заготовки и инструмента. |
|
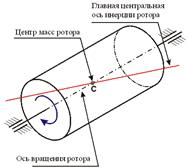
Статическая
неуравновешенность |
характеризуется тем, что главная центральная ось инерции
ротора расположена параллельно оси его вращения, а центр масс ротора смещен
от оси вращения на величину е статическое. |
|
Статическое
уравновешивание масс механизма |
распределение
масс звеньев, переводящее его центр масс в точку, неподвижную относительно
стойки. |
|
Степень
подвижности механизма |
целое число (W), показывающее
сколько независимых движений нужно подвести к механизму, чтобы на выходе получить
одно или наоборот. Большинство механизмов имеет степень подвижности W = 1; у
дифференциальных механизмов W = 2; у роботов и манипуляторов W = 4 – 8 (чаще
всего у них W = 4), также как и у основного механизма экскаватора. Степень подвижности W плоских
механизмов определяется по формуле Чебышева W = 3n – 2P5 – P4, где n – число
подвижных звеньев; Р5, Р4 – число кинематических пар 4, 5
классов; 1, 2, 3 – число исключаемых степеней свободы. |
|
Степень
подвижности кинематической пары |
целое число, показывающее
сколько независимых движений
позволяет делать данная пара одному звену относительно
другого. По степени подвижности пары делят на:
одноподвижные, двухподвижные, трехподвижные,
четырехподвижные и пятиподвижные. |
|
Стойка
(редко: корпус, рама, станина, основание) |
звено, принимаемое за
неподвижное
|
|
Структурная
группа |
кинематическая цепь, число степеней, свободы которой
равно нулю относительно элементов ее внешних пар и которая не может распадаться
на более простые структурные группы. Структурные группы могут быть однозвенными
(с двумя или большим числом кинематических пар разной подвижности), двухзвенными
и многозвенными. Структурная группа удовлетворяет следующим условиям: плоская группа
3n=2p1-p2 пространственная группа 6n=5p1+4p2+3p3+2p4+p5 Здесь n — число звеньев в группе; p1, p2,…,
p5 — число кинематических пар, подвижность которых указана цифровым
индексом. |
|
Структурная
схема механизма |
схема механизма, указывающая стойку, подвижные звенья,
виды кинематических пар и их взаимное расположение. Может изображаться графически,
либо цифровой, либо буквенно-цифровой записью. |
|
Структурный
синтез механизма |
это определение структуры механизма подходящей для
выполнения заданного назначения |
|
Структурный
анализ механизма |
это определение количества звеньев и кинематических
пар, классификация кинематических пар, определение степени подвижности механизма,
а также установление класса и порядка механизма. |
|
Сферическая
(с пальцем) двухподвижная пара |
двухподвижная пара,
допускающая сферическое движение одного звена относительно другого. |
|
Сферическая
трехподвижная |
трехподвижная пара, допускающая
сферическое движение одного звена относительно другого. |
Т
|
схема
согласованности перемещений исполнительных органов в зависимости от их
положения. |
|
|
Такт
движения |
промежуток времени,
в течение которого не меняется состояние (наличие или отсутствие движений) ни
одного из исполнительных органов. |
|
Теорема
Грасгофа |
наименьшее звено является кривошипом, если сумма
длин его и любого другого звена меньше суммы длин остальных звеньев. |
|
Теорема плоского зацепления |
общая нормаль в точке контакта сопряженных профилей в любой момент зацепления должна проходить через полюс зацепления, положение которого на межосевой линии определяется заданным передаточным относительным движением звеньев. (Для обеспечения заданного углового передаточного отношения общая нормаль к профилям в точке их зацепления должна делить линию межосевого расстояния на отрезки, обратно пропорциональные угловым скоростям колес). |
|
Теорема
подобия |
концы векторов абсолютных скоростей (ускорений) точек
звена образуют на плане скоростей (плане ускорений) фигуру подобную фигуре,
образованной одноименными точками звена. |
|
Теория
машин и механизмов (ТММ) |
наука, изучающая строение, кинематику и динамику механизмов
и машин в связи с их анализом и синтезом. ТММ включает три основные части: 1. Структурный и кинематический анализ механизмов -
изучение теории строения механизмов, исследование движения тел образующих механизм
с точки зрения геометрии без учета сил, вызывающих движение этих тел. 2. Синтез механизмов - проектирование механизмов по
заданным кинематическим и динамическим условиям. 3. Динамический анализ механизмов - определение сил,
действующих на звенья механизма во время их движения, изучение взаимосвязи между
движениями тел, их массами и силами действующими на
них. |
|
Траектория
точки |
кривая, по которой перемещается точка звена во время
работы механизма |
|
Трансформирующая
машина |
техническое устройство, потребляющее энергию извне и совершающее полезную работу. Например, насосы, станки, прессы. |
|
Трение
внешнее |
называется противодействие относительному перемещению соприкасающихся тел в направлении, лежащем в плоскости их соприкосновения. |
|
Трение
полужидкостное |
называется внешнее трение, при котором между трущимися поверхностями соприкасающихся тел есть тонкий (порядка 0,1 мкм и менее) слой смазки, обладающий свойствами, отличными от ее обычных свойств. |
|
Трение
сухое |
называется внешнее трение, при котором трущиеся поверхности соприкасающихся тел покрыты пленками окислов и адсорбированными молекулами газов или жидкостей, а смазка отсутствует. |
|
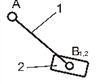
Толкатель |
звено кулачкового механизма, взаимодействующее с рабочей
поверхностью кулачка своим наконечником (башмаком), который может быть острым
(точечный или линейный), плоским, грибовидным и роликовым, и совершающее поступательное
или вращательное движение. Звено 1, образующее с кулачком 2 кинематическую пару.
|
У
|
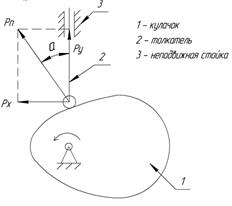
Угол давления 𝜶 |
называется угол между направлением силы и направлением
перемещения, вызванного этой силой. Составляющая сила Ру является движущей
силой для толкателя и определяется по формуле Ру = Рncosα.
Составляющая сила Рх
прижимает толкатель к направляющей и определяется по формуле Рх = Рnsinα. С увеличением
угла давления увеличиваются потери энергии на трение. Значения его не должны
превосходить допускаемых значений, устанавливаемых в зависимости от типа
механизма и условий его работы.
|
|
Угол
профиля |
угол между касательной к эвольвенте в данной точке и
радиус-вектором данной точки. |
|
Уравнительное
смещение инструмента |
расстояние между граничной прямой инструмента и окружностью вершин заготовки. |
|
Уравновешенный
механизм |
механизм, для которого главный вектор и главный момент
сил давления стойки на фундамент (или опору стойки)
остаются постоянными при заданном движении начальных звеньев. |
|
Уравновешивание
механизма |
распределение масс звеньев или подбор внешних сил,
действующих на звенья механизма, при которых механизм становится уравновешенным. |
|
Уравновешивание
масс механизма |
распределение масс звеньев, устраняющее давление
стойки на фундамент (или опору стойки) от сил инерции звеньев. |
|
Уравновешивание
сил инерции |
Если
привести силы инерции всех звеньев к центру тяжести механизма, то
приведенная сила инерции |
|
Уравновешивание
вращающегося звена полное |
распределение масс вращающегося звена, устраняющее
давление от сил инерции этого звена на стойку. |
|
Уравновешивание
вращающегося звена статическое |
распределение масс вращающегося звена, переводящее
его центр масс на ось вращения. |
|
Условия
связи |
ограничения, накладываемые на независимые движения звеньев, образующих кинематическую пару. |
|
Установившееся движение механизма |
движение механизма, при котором его кинетическая энергия является периодической функцией времени. |
|
Установившегося
движения механизма цикл |
период изменения кинетической энергии. |
Ф
|
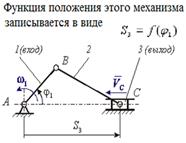
Функция положения механизма |
зависимость координаты выходного звена от обобщенных координат механизма.
|
|
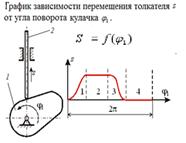
Фазы
движения толкателя |
удаление, выстой при максимальном удалении, сближение,
выстой при минимальном сближении к оси вращения кулачка. Соответствующие углы
профиля кулачка обозначают φУ,
φД, φC, φБ. Рабочий угол профиля равен
сумме первых трех фаз: φР= φУ+φД+φC. |
|
Формула
Сомова-малышева |
Производится расчет степени свободы пространственных
механизмов W=6n-5p5-4p4-3p3-2p2-p1, где n- число
подвижных звеньев; p5,p4,p3,p2,p1- число
кинематических пар пятого, четвертого, третьего, второго и первого классов
соответственно. |
|
Формула
Чебышева |
Производится расчет степени свободы плоских
механизмов W=3n-2p5-p4 Степень свободы плоского механизма должна быть равна
числу ведущих звеньев, то есть W=1. |
Ц
|
Центровой
профиль кулачка |
траектория центра ролика на толкателе относительно
конструктивного профиля кулачка. |
|
Центроида |
геометрическое место мгновенных центров скоростей звеньев, движущихся относительно друг друга. |
|
Центр
тяжести механизма |
называется общий центр тяжести всех его подвижных
звеньев без стойки. |
|
Центральные
зубчатые колеса |
зубчатые колеса, имеющие неподвижную геометрическую ось в пространстве. |
|
Цикл |
промежуток времени, по истечению которого все кинематические параметры принимают первоначальное значение, а технологический процесс, происходящий в рабочей машине, начинает повторяться. |
|
Циклограмма
машины |
схема
согласованности перемещений исполнительных органов в зависимости от времени. |
|
Цилиндрическая
пара |
двухподвижная пара,
допускающая вращательное и поступательное (вдоль оси вращения) движение
одного звена относительно другого. |
|
Цилиндрические
зубчатые передачи |
передачи с параллельными осями колес
Цилиндрические передачи классифицируют: - по пространственному расположению – на внешние, внутренние и реечные. - по форме зуба – на прямо- и косозубые.
У первых линия зуба паралл. оси колеса, у вторых –
расположена под углом. - по боковой поверхности – на эвольвентные,
зацепление Новикова (боковая поверхность очерчена по дуге окружности) и др. - по передаточному отношению. |

Ч
|
Червячная
передача |
механизм для передачи вращения между валами со скрещивающимися осями посредством винта (червяка) и сопряженного с ним червячного колеса. |
|
Число
степеней подвижности |
число независимых возможных перемещений. |
|
Червячная
фреза |
инструмент для нарезания зубчатых колес методом обкатки (огибания). |
|
Частичное
уравновешивание плоского механизма |
при котором сумма всех сил
инерции равна нулю, а сумма моментов сил инерции не равна нулю. Такое частичное
уравновешивание называется статическим. |
|
Число
степеней свободы материальной точки или
тела (звена) |
число независимых координат (перемещений), которым
обладает материальная точка или тело (звено). |
|
Число
степеней свободы механизма |
число независимых вариаций обобщённых координат
(возможных перемещений) механизма. Структурные степени свободы механизма определяются
геометрическими связями. Параметрические степени свободы зависят от массы,
жёсткости звеньев и параметров режима движения. |
Ш
|
Шаг делительный (зубьев) |
расстояние между одноименными профилями двух соседних зубьев, измеренное по делительной окружности. |
|
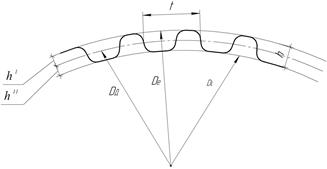
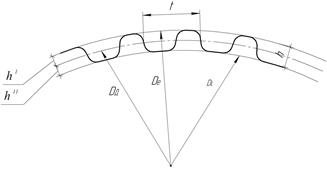
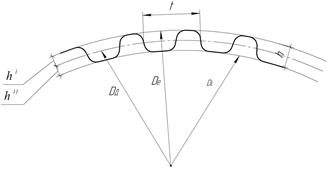
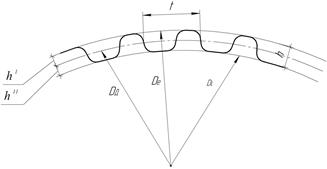
Шаг зацепления |
расстояние t между
одинаково расположенными точками двух соседних зубьев, измеренное по
делительной окружности.
|
|
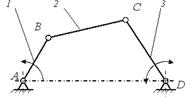
Шарнирный
механизм |
механизм, звенья которого образуют только вращательные пары. Примерами шарнирных механизмов являются кривошипно-коромысловый механизм, двухкоромысловый механизм и др.
|
|
Шарнирный
четырехзвенный механизм |
шарнирный механизм, содержащий три подвижных звена и стойку. |
|
Шатун
|
звено рычажного механизма, образующее кинематические пары только с подвижными звеньями (совершает сложно-плоское движение относительно стойки) (звено 3).
|
|
Шатунная
кривая |
траектория, описываемая какой-либо точкой шатуна. |
Э
|
Эвольвента |
кривая, геометрическое место центров кривизны которой является другая кривая, называемая эволютой. |
|
Элемент звена |
поверхности,
линии, точки, по которым оно может соприкасаться с другим звеном, образуя кинематическую
пару. |
|
Элемент кинематической пары
|
совокупность поверхностей, линий и отдельных точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару. |
email: KarimovI@rambler.ru
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Теоретическая механика Сопротивление материалов
Прикладная механика Детали машин Строительная механика