Главная
Лекция 3.
Кинематический анализ механизмов.
Цели и задачи
кинематического анализа
Кинематический
анализ механизма – исследование его основных параметров с целью
изучения законов изменения и на основе этого выбор из ряда известных наилучшего
механизма. По сравнению с синтезом анализ механизма широко используется в практике.
Кинематический
анализ механизма выполняется либо для заданного момента времени, либо для
заданного положения входного звена; иногда для анализируемого положения
механизма задают взаимное расположение каких-либо его звеньев.
Цели:
1. Определение кинематических характеристик звеньев: перемещение; скорость; ускорение; траектория движения; функция положения при известных законах движения входных (ведущих) звеньев.
2. Оценка кинематических условий работы рабочего (выходного) звена.
3.
Определение необходимых численных данных для проведения силового,
динамического, энергетического и других расчётов механизма.
Исходные
данные:
1. Кинематическая схема механизма.
2. Размеры и иные геометрические параметры звеньев (но только такие, которые не изменяются при движении механизма).
3. Законы движения входных звеньев (или параметры движения, например, угловая скорость и угловое ускорение входного звена в выбранном для анализа положении механизма).
Для механизмов, подчиняющихся классификации Л. В. Ассура, порядок кинематического анализа определяется формулой строения: вначале находят параметры движения начальных механизмов и затем – структурных групп в порядке следования их в формуле строения. Здесь следует руководствоваться простым правилом: кинематика любого элемента формулы строения может быть изучена только после того, как она изучена для всех предшествующих в этой формуле элементов.
Задачи:
- о положениях звеньев механизма. Определение траекторий движения точек;
- о скоростях звеньев или отдельных точек механизма;
- об ускорениях звеньев или отдельных точек механизма.
Методы:
- графический (или метод графиков и диаграмм);
- графоаналитический (или метод планов скоростей и ускорений);
- аналитический;
- экспериментальный.
Графический метод
кинематического анализа
Преимущество этого метода заключается в наглядности и простоте. Он хорош для кинематического анализа звеньев, совершающих возвратно-поступательное движение. Недостаток метода – невысокая точность, которая зависит от точности графических построений.
Задача
о положениях решается построением нескольких совмещённых планов
механизма в выбранном масштабе длин при различных
последовательных положениях ведущего звена.
Задачи о скоростях и ускорениях решаются построением графиков (диаграмм) перемещений, скоростей и ускорений исследуемой точки.
Последовательность
кинематического анализа:
1. Сначала строят несколько (чаще всего 12 и более) совмёщенных планов механизма в произвольно выбранном масштабе длин.
2. Затем строят график пути (перемещения) исследуемой точки или звена, для чего используют совмещённые планы механизма и последовательные положения на них исследуемой точки или звена.
3. Графическим дифференцированием графика перемещений строят график скорости исследуемой точки.
4. Графическим дифференцированием графика скоростей строят график ускорений.
Графическое дифференцирование можно производить методом хорд и методом касательных. С целью повышения точности удобно использовать оба метода одновременно.
Пример 1.
Даны
кривошипно-ползунный механизм, длины звеньев которого – кривошипа и шатуна – LOA и LAB соответственно, и угловая скорость кривошипа ![]() .
.
Определить скорости и ускорения ползуна при различных положениях кривошипа.
Решение.
Выбираем
масштабы длин ![]() , м/мм, где AO – длина
отрезка, мм, изображающая кривошип длиной LОА на строящемся
плане механизма; эта длина выбирается произвольно с учётом того, что совмещённые
планы механизма должны разместиться на отведённом месте чертежа, а сам масштаб
длин был бы удобен для дальнейших расчётов.
, м/мм, где AO – длина
отрезка, мм, изображающая кривошип длиной LОА на строящемся
плане механизма; эта длина выбирается произвольно с учётом того, что совмещённые
планы механизма должны разместиться на отведённом месте чертежа, а сам масштаб
длин был бы удобен для дальнейших расчётов.
Вычисляем
длину отрезка ![]() , мм, изображающего шатун на плане
механизма. При построении совмещенных планов механизма используют метод
засечек (рис. 3.1).
, мм, изображающего шатун на плане
механизма. При построении совмещенных планов механизма используют метод
засечек (рис. 3.1).
Для построения графиков скоростей и ускорений (рис. 3.1) выбираются полюсные расстояния hu и ha, где hu – полюсное расстояние при построении графика скоростей, которое выбирается произвольной длины; рекомендуется его величину выбирать в пределах hu=30…40 мм; ha – полюсное расстояние при построении графика ускорений; его рекомендуется принимать в пределах ha=30…40 мм.
Масштабы времени, скорости и ускорения вычисляют по формулам, вывод которых приводится ниже.
Масштаб времени можно вычислить по формуле
![]() ,
,
где Т – период одного оборота кривошипа, с; LX – длина отрезка между точками 1 и 1 на графике (диаграмме) перемещений, мм.
Так как период Т можно вычислить по формулам
![]() , или
, или ![]() , с,
, с,
где ![]() – угловая скорость кривошипа, 1/с; n1
– частота вращения кривошипа, об/мин,
то масштаб времени
– угловая скорость кривошипа, 1/с; n1
– частота вращения кривошипа, об/мин,
то масштаб времени
![]() , с/мм.
, с/мм.
Масштаб скорости можно вывести из условия, что скорость исследуемой точки является производной перемещения S по времени:
![]() .
.
Здесь
предполагается, что масштаб перемещений ![]() и масштаб времени
и масштаб времени ![]() являются постоянными
величинами.
являются постоянными
величинами.
Так как ![]() , то
, то ![]() , отсюда
, отсюда
![]() ,
, ![]() .
.
Масштаб ускорения, вывод которого аналогичен предыдущему, вычисляется по формуле
![]() ,
,![]() .
.
Для
определения величины скорости или ускорения в каком-либо положении точки В необходимо
длину ординаты соответствующего графика умножить на масштаб ![]() или
или ![]() соответственно.
соответственно.

Рис. 3.1. Совмещённые планы механизма, графики перемещений, скоростей и ускорений
Графоаналитический
метод кинематического анализа
Графоаналитический
метод называют методом планов скоростей и ускорений.
Задача о положениях решается графическим методом, то есть построением нескольких совмещённых планов механизма в выбранном масштабе длин.
Задачи о скоростях и ускорениях решаются построением планов скоростей и ускорений звеньев механизма при определённых (заданных) положениях ведущего звена на основе заранее составленных векторных уравнений скоростей и ускорений звеньев механизма.
Преимущество этого метода по сравнению с графическим в том, что он менее трудоёмок, так как позволяет определять скорости и ускорения (их величину и направление) на одном плане скоростей или плане ускорений для множества точек механизма.
Недостатком метода является то, что требуется построить планы скоростей и ускорений для нескольких положений механизма (если необходимо определять скорость и ускорение при различных положениях механизма и его звеньев).
Следует помнить, что в основе построения планов скоростей и ускорений лежат законы плоскопараллельного движения. Согласно этим законам:
1. План скоростей (а также план ускорений) получается в результате графического решения векторных уравнений для определения скоростей (ускорений) точек в плоскопараллельном движении;
2. Векторы абсолютных скоростей точек (при рассмотрении их движения относительно неподвижного звена) изображаются исходящими из полюса плана, а направление совпадает с касательными к траектории движения. Векторы относительных скоростей точек (при их движении относительно подвижных точек) изображаются отрезками, соединяющими концы соответствующих векторов абсолютных скоростей;
3. Длина векторов относительных скоростей пропорциональна длине тех участков звеньев, которые являются радиусами вращения точек в их относительном движении. Это положение, известное под названием теоремы подобия, облегчает определение скоростей многих точек, лежащих на звеньях плоскопараллельного и вращательного движения.
Определение скоростей
графоаналитическим методом.
Представим
себе плоское движение (рис.3.2).

Рис.3.2
Модуль
скорости точки ![]() можно определить по
формуле:
можно определить по
формуле: ![]() , а линия действия этого вектора будет перпендикулярная
отрезку
, а линия действия этого вектора будет перпендикулярная
отрезку ![]() .
.
Модуль
скорости точки ![]() можно определить по
формуле:
можно определить по
формуле: ![]() , а линия действия этого вектора будет перпендикулярная
отрезку
, а линия действия этого вектора будет перпендикулярная
отрезку ![]() .
.
Модуль
скорости точки ![]() можно определить по
формуле:
можно определить по
формуле: ![]() , а линия действия этого вектора будет перпендикулярная
отрезку
, а линия действия этого вектора будет перпендикулярная
отрезку ![]() .
.
![]() - мгновенный центр
вращения.
- мгновенный центр
вращения.
Видно, что
модули скоростей точек ![]() ,
, ![]() и
и ![]() пропорциональны длинам
отрезков
пропорциональны длинам
отрезков ![]() ,
, ![]() и
и ![]() , то есть:
, то есть: ![]() .
.
Многоугольник ![]() подобен многоугольнику
подобен многоугольнику
![]() , так как он образован взаимно перпендикулярными
и пропорциональными прямыми. Поэтому рис.3.2 представляет собой план скоростей
треугольника
, так как он образован взаимно перпендикулярными
и пропорциональными прямыми. Поэтому рис.3.2 представляет собой план скоростей
треугольника ![]() , то есть треугольник
, то есть треугольник ![]() является планом
скоростей треугольника
является планом
скоростей треугольника ![]() .
.
План
скоростей жёсткого звена – геометрическое место точек
концов векторов абсолютных скоростей любых точек звена, если они
построены из одной общей точки ![]() , называемой полюсом плана скоростей.
, называемой полюсом плана скоростей.
План скоростей
всегда строится в масштабе. В дисциплине «Теория машин и механизмов» масштаб
имеет размерность, поэтому его принято называть масштабным коэффициентом: ![]() ,
,  .
.
План скоростей
подобен самому звену, и повёрнут на девяносто градусов в сторону мгновенного
вращения.
Если план скоростей
жёсткого звена подобен своему звену, то план скоростей механизма не подобен
самому механизму, так как в отличие от жёсткого звена механизм есть изменяемая
подвижная система.
План
скоростей механизма – совокупность планов скоростей отдельных звеньев,
построенных из одной общей точки ![]() , называемой полюсом плана скоростей.
, называемой полюсом плана скоростей.
Пример 2.
Дано: ![]() ,
, ![]() и
и ![]() (рис.3.3).
(рис.3.3).
Требуется определить: ![]() .
.
Зададимся неким
масштабным коэффициентом ![]() .
.

Рис.3.3
Решение:
Для построения
плана скоростей механизма существуют различные методы, наиболее
распространённым из которых является метод векторных уравнений, разработанный
советскими учёными.
Модуль
скорости точки ![]() можно определить по
следующей формуле:
можно определить по
следующей формуле: ![]() . Линия действия вектора скорости точки
. Линия действия вектора скорости точки ![]() перпендикулярна звену
перпендикулярна звену ![]() , а сам вектор направлен в сторону вращения звена
, а сам вектор направлен в сторону вращения звена ![]() .
.
Допустим, что
точка ![]() не закреплена, и
представим себе, что все точки звена
не закреплена, и
представим себе, что все точки звена ![]() совершают переносное
движение со скоростью
совершают переносное
движение со скоростью ![]() , то есть
, то есть ![]() . С одной стороны
. С одной стороны ![]() , с другой стороны
, с другой стороны ![]() .
.
Вернём точку ![]() на действительную
траекторию
на действительную
траекторию ![]() , для чего придадим точке
, для чего придадим точке ![]() скорость
относительного вращательного движения около точки
скорость
относительного вращательного движения около точки ![]() со скоростью
относительного движения
со скоростью
относительного движения ![]() .
.
На плане
скоростей векторы, исходящие из полюса скоростей ![]() являются векторами
абсолютных скоростей соответствующих точек, а векторы, которые не проходят
через полюс плана ускорений, являются относительных скоростей соответствующих точек.
Отрезок
являются векторами
абсолютных скоростей соответствующих точек, а векторы, которые не проходят
через полюс плана ускорений, являются относительных скоростей соответствующих точек.
Отрезок ![]() является планом
скоростей звена
является планом
скоростей звена ![]() , а отрезок
, а отрезок ![]() является планом
скоростей звена
является планом
скоростей звена ![]() .
.
Определение ускорений графоаналитическим методом.
Рассуждая
аналогично теореме подобия для определения скоростей отдельных точек звеньев,
очевидно, что план ускорений жёсткого звена подобен самому звену, и повёрнут на
девяносто градусов.
Полное
ускорение можно найти геометрически просуммировав
нормальное и тангенциальное ускорения, то есть: ![]() (рис.3.4).
(рис.3.4).

Рис.3.4
Модуль вектора
нормального ускорения точки ![]() можно найти по
формуле:
можно найти по
формуле: ![]() . Линия действия этого вектора будет перпендикулярна звену
. Линия действия этого вектора будет перпендикулярна звену ![]() .
.
Модуль вектора
тангенциального ускорения точки ![]() можно найти по
формуле:
можно найти по
формуле: ![]() . Линия действия этого вектора будет параллельна звену
. Линия действия этого вектора будет параллельна звену ![]() .
.
План ускорений
механизма, как и план скоростей, не подобен самому механизму, и является
совокупностью планов ускорений отдельных звеньев, построенных из одного полюса
плана ускорений ![]() .
.
Пример 3.
Заданы
геометрические параметры всех звеньев и угловая скорость ![]() , которая является постоянной величиной.
, которая является постоянной величиной.
Требуется
определить ускорение точки ![]() .
.

Рис.3.5
Решение:
Построение плана скоростей.
Скорости точек
![]() и
и ![]() равны нулю, поэтому на
плане скоростей точки
равны нулю, поэтому на
плане скоростей точки ![]() и
и ![]() совпадают с полюсом
плана скоростей
совпадают с полюсом
плана скоростей ![]() (рис.3.6).
(рис.3.6).

Рис.3.6
Модуль
скорости точки ![]() :
: ![]() . Линия действия вектора скорости точки
. Линия действия вектора скорости точки ![]() : перпендикулярно звену
: перпендикулярно звену ![]() .
.
Зададимся
неким масштабным коэффициентом ![]() , и построим вектор
, и построим вектор ![]() на плане скоростей.
на плане скоростей.
Скорость точки
![]() определяется из
решения векторного уравнения
определяется из
решения векторного уравнения ![]() , где
, где ![]() - скорость точки
- скорость точки ![]() ;
; ![]() - скорость точки
- скорость точки ![]() ,
, ![]() - скорость звена
- скорость звена ![]() в его относительном
вращении около точки
в его относительном
вращении около точки ![]() . Вектор
. Вектор ![]() известен. Линия
действия вектора
известен. Линия
действия вектора ![]() : перпендикулярно звену
: перпендикулярно звену ![]() . Линия действия вектора
. Линия действия вектора ![]() : параллельно направляющей
: параллельно направляющей ![]() .
.
Скорость точки
![]() определяется с помощью
теоремы подобия и правила чтения букв. Правило чтения букв заключается в том,
что порядок написания букв на плане скоростей или ускорений жёсткого звена
должен в точности соответствовать порядку написания букв на самом звене. Из
пропорции
определяется с помощью
теоремы подобия и правила чтения букв. Правило чтения букв заключается в том,
что порядок написания букв на плане скоростей или ускорений жёсткого звена
должен в точности соответствовать порядку написания букв на самом звене. Из
пропорции ![]() , можно определить длину отрезка
, можно определить длину отрезка ![]() и, построив его на
плане скоростей, получить точку
и, построив его на
плане скоростей, получить точку ![]() . Соединив полюс плана скоростей
. Соединив полюс плана скоростей ![]() с точкой
с точкой ![]() получим вектор
скорости точки
получим вектор
скорости точки ![]() -
- ![]() .
.
Скорость точки
![]() определяется с помощью
решения системы геометрических уравнений:
определяется с помощью
решения системы геометрических уравнений:  , или
, или  .
.
Скорости точек
![]() и
и ![]() определяются с помощью
теоремы подобия и правила чтения букв:
определяются с помощью
теоремы подобия и правила чтения букв: ![]() , следовательно,
, следовательно, ![]() ;
; ![]() , следовательно,
, следовательно, ![]() , при этом
, при этом ![]() .
.
Выводы:
1. Как видно из построений, план скоростей механизма не подобен самому механизму.
2. План
скоростей даёт возможность найти скорость любой точки любого звена по величине
и направлению.
Построение плана ускорений.
Ускорения
точек ![]() и
и ![]() равны нулю, поэтому
соответствующие им точки
равны нулю, поэтому
соответствующие им точки ![]() и
и ![]() на плане ускорений
совпадают с полюсом плана ускорений
на плане ускорений
совпадают с полюсом плана ускорений ![]() (рис.3.7).
(рис.3.7).

Рис.3.7
Ускорение
точки ![]() можно найти с помощью
решения векторного уравнения
можно найти с помощью
решения векторного уравнения ![]() , где
, где ![]() - ускорение точки
- ускорение точки ![]() , которое равно нулю;
, которое равно нулю; ![]() - ускорение звена
- ускорение звена ![]() в его относительном
движении около точки
в его относительном
движении около точки ![]() . Ускорение звена
. Ускорение звена ![]() можно представить в
виде векторной суммы его нормального и тангенциального ускорений, то есть:
можно представить в
виде векторной суммы его нормального и тангенциального ускорений, то есть: ![]() . Тангенциальное ускорение звена
. Тангенциальное ускорение звена ![]() равно нулю, поскольку
его угловая скорость не меняется, поэтому ускорение точки
равно нулю, поскольку
его угловая скорость не меняется, поэтому ускорение точки ![]() равно нормальному
ускорению звена
равно нормальному
ускорению звена ![]() , то есть
, то есть ![]() Модуль нормального
ускорения звена
Модуль нормального
ускорения звена ![]() :
: ![]() . Линия действия вектора
. Линия действия вектора ![]() : параллельно звену
: параллельно звену ![]() . Направление вектора
. Направление вектора ![]() : к точке
: к точке ![]() . Задавшись масштабным коэффициентом
. Задавшись масштабным коэффициентом ![]() , строится вектор
, строится вектор ![]() .
.
Скорость точки
![]() находится с помощью
геометрического решения векторного уравнения:
находится с помощью
геометрического решения векторного уравнения: ![]() , где
, где ![]() - ускорение точки
- ускорение точки ![]() ;
; ![]() - ускорение точки
- ускорение точки ![]() ;
; ![]() - нормальное ускорение
звена
- нормальное ускорение
звена ![]() ;
; ![]() - тангенциальное
ускорение звена
- тангенциальное
ускорение звена ![]() . Направление ускорения точки
. Направление ускорения точки ![]() : параллельно направляющей
: параллельно направляющей ![]() . Ускорение точки
. Ускорение точки ![]() известно. Модуль
нормального ускорения звена
известно. Модуль
нормального ускорения звена ![]() :
: ![]() ; линия действия вектора
; линия действия вектора ![]() : параллельно звену
: параллельно звену ![]() ; направление вектора
; направление вектора ![]() : к точке
: к точке ![]() . Линия действия вектора тангенциального ускорения звена
. Линия действия вектора тангенциального ускорения звена ![]() : перпендикулярно звену
: перпендикулярно звену ![]() .
.
Ускорение
точки ![]() находится с помощью
теоремы подобия и правила чтения букв:
находится с помощью
теоремы подобия и правила чтения букв: ![]() , следовательно,
, следовательно, ![]() .
.
Ускорение
точки ![]() можно найти с помощью
решения системы векторных уравнений:
можно найти с помощью
решения системы векторных уравнений:  или
или  .
.
Ускорения
точек ![]() и
и ![]() определяются с помощью
теоремы подобия и правила чтения букв:
определяются с помощью
теоремы подобия и правила чтения букв: ![]() , следовательно,
, следовательно, ![]() ;
; ![]() , следовательно,
, следовательно, ![]() .
.
Планы скоростей и
ускорений шарнирного четырёхзвенника. Понятие о
теореме подобия для определения скоростей и ускорений.
При решении
задач такого типа известны угловая скорость ![]() ведущего звена 1 –
кривошипа, длины звеньев и координаты неподвижных точек.
ведущего звена 1 –
кривошипа, длины звеньев и координаты неподвижных точек.
Последовательность решения задачи:
1. Строится план механизма (рис. 3.8) в выбранном масштабе длин:
![]() , м/мм,
, м/мм,
где LOA – длина кривошипа, м; AO – длина отрезка, изображающего кривошип на плане механизма, мм.
Для построения
плана механизма остальные длины звеньев и координаты неподвижных точек
шарнирного четырехзвенника (рис. 3.8) переводятся
масштабом длин ![]() в отрезки:
в отрезки:
![]() , мм,
, мм,
![]() , мм,
, мм,
![]() , мм.
, мм.
2. Составляются векторные уравнения линейных скоростей отдельных точек, принадлежащих звеньям механизма.
Векторное уравнение для звена 2 (шатуна)
![]() (1)
(1)
где ![]() – скорость точки А, которая равна скорости точки А относительно оси вращения кривошипа
точки О;
– скорость точки А, которая равна скорости точки А относительно оси вращения кривошипа
точки О; ![]() – вектор относительной скорости точки В шатуна относительно А имеет направление, перпендикулярное
отрезку АВ на плане механизма.
– вектор относительной скорости точки В шатуна относительно А имеет направление, перпендикулярное
отрезку АВ на плане механизма.
Векторное уравнение для звена 3 (коромысла)
![]() (2)
(2)
Так как точка С (ось вращения коромысла 3) неподвижна,
то её скорость равна нулю (![]() ), а вектор относительной скорости точки В относительно С (
), а вектор относительной скорости точки В относительно С (![]() ) имеет направление, перпендикулярное отрезку ВС на плане механизма.
) имеет направление, перпендикулярное отрезку ВС на плане механизма.
3. Строится план скоростей механизма – это не что иное, как графическое изображение на чертеже векторных уравнений (1) и (2) в каком-либо масштабе.
План скоростей механизма и его свойства
План скоростей желательно строить рядом с планом механизма (рис. 3.8). Предварительно рассчитывается скорость точки А кривошипа:
![]() , м/с.
, м/с.
Затем
выбирается масштаб плана скоростей ![]() по
соотношению
по
соотношению
![]() ,
, ![]() ,
,
где ![]() – скорость точки А, м/с; PVa – длина
отрезка, изображающего на будущем плане скоростей скорость
– скорость точки А, м/с; PVa – длина
отрезка, изображающего на будущем плане скоростей скорость ![]() , выбирается произвольной длины в мм; при выборе желательно
придерживаться условий: во-первых, план скоростей должен размещаться на отведённом
месте чертежа, во-вторых, численное значение масштаба
, выбирается произвольной длины в мм; при выборе желательно
придерживаться условий: во-первых, план скоростей должен размещаться на отведённом
месте чертежа, во-вторых, численное значение масштаба ![]() должно быть удобным
для расчётов (
должно быть удобным
для расчётов (![]() должно быть круглым числом).
должно быть круглым числом).
После этого можно приступать к построению плана скоростей механизма. Его следует проводить в последовательности, соответствующей написанию векторных уравнений (1) и (2).
Сначала проводится из произвольно выбранной рядом с планом
механизма точки ![]() (полюса плана скоростей) вектор скорости
(полюса плана скоростей) вектор скорости ![]() , который перпендикулярен отрезку ОА на плане механизма и имеет длину PVa, выбранную нами при определении масштаба
плана скоростей
, который перпендикулярен отрезку ОА на плане механизма и имеет длину PVa, выбранную нами при определении масштаба
плана скоростей ![]() . Затем через точку a проводится линия,
перпендикулярная отрезку АВ плана
механизма, а через полюс PV – линия,
перпендикулярная отрезку ВС.
Пересечение этих линий даёт точку b. В соответствии с
векторными уравнениями (1) и (2) на построенном плане наносятся направления
(стрелки) векторов
. Затем через точку a проводится линия,
перпендикулярная отрезку АВ плана
механизма, а через полюс PV – линия,
перпендикулярная отрезку ВС.
Пересечение этих линий даёт точку b. В соответствии с
векторными уравнениями (1) и (2) на построенном плане наносятся направления
(стрелки) векторов ![]() и
и ![]() .
.
Определим скорость точки К, принадлежащей шатуну. Для неё можно записать векторные уравнения скоростей:
![]()
![]()
где вектор
скорости ![]() перпендикулярен отрезку АК на плане механизма, а вектор
перпендикулярен отрезку АК на плане механизма, а вектор ![]() – отрезку КВ.
– отрезку КВ.
Построением этих векторных уравнений получаем точку k на плане скоростей. При этом из точки a плана скоростей проводим линию, перпендикулярную отрезку АК, а через точку b плана скоростей – линию, перпендикулярную отрезку ВК плана механизма. Величину скорости точки К можно вычислить по формуле
![]() ,
,
где ![]() – длина
соответствующего вектора на плане скоростей.
– длина
соответствующего вектора на плане скоростей.
Можно заметить, что треугольники на плане скоростей и плане механизма подобны:
![]() ,
,
так как стороны их взаимно перпендикулярны. Это свойство можно использовать для определения скорости любой другой точки, принадлежащей какому-либо звену механизма. Отсюда следует теорема подобия: отрезки относительных скоростей на плане скоростей образуют фигуру, подобную фигуре соответствующего звена на плане механизма. Стороны фигур взаимно перпендикулярны.
Угловые скорости шатуна 2 и коромысла 3 рассчитываются по формулам
![]() , c-1,
, c-1,
![]() , c-1.
, c-1.
Направления
угловых скоростей определяются по направлениям векторов ![]() и
и ![]() . Для этого вектор
. Для этого вектор ![]() условно переносится в
точку В
плана механизма. Куда он будет вращать шатун 2 относительно точки А, в ту сторону и
будет направлена угловая скорость шатуна
условно переносится в
точку В
плана механизма. Куда он будет вращать шатун 2 относительно точки А, в ту сторону и
будет направлена угловая скорость шатуна ![]() .
.
Аналогично
поступают со скоростью ![]() . В каком направлении будет вращаться коромысло относительно
точки С,
туда и будет направлена угловая скорость
. В каком направлении будет вращаться коромысло относительно
точки С,
туда и будет направлена угловая скорость ![]() .
.
План ускорений механизма и его свойства
Последовательность
построения плана ускорений рычажного механизма аналогична построению плана
скоростей. Рассмотрим её на примере механизма шарнирного четырехзвенника
(рис. 3.8). Примем угловую скорость кривошипа постоянной (![]() , что является наиболее распространённым и
рациональным видом движения в реальных механизмах).
, что является наиболее распространённым и
рациональным видом движения в реальных механизмах).
Векторное уравнение ускорений для звена 1 (кривошипа)
![]()
где нормальная
составляющая ускорения точки A относительно O рассчитывается по формуле ![]() .
.
Вектор ![]() параллелен отрезку АО на плане механизма. Тангенциальная
составляющая ускорения
параллелен отрезку АО на плане механизма. Тангенциальная
составляющая ускорения ![]() рассчитывается по
формуле
рассчитывается по
формуле
![]() .
.
В нашем случае
угловое ускорение кривошипа ![]() , тогда
, тогда ![]() .
.
Векторное уравнение ускорений для звена 2 (шатуна)
![]()
где нормальная
составляющая ускорения точки В относительно точки А
рассчитывается по формуле ![]() .
.
Вектор ![]() параллелен отрезку АВ и направлен от В к А, а тангенциальная составляющая
параллелен отрезку АВ и направлен от В к А, а тангенциальная составляющая ![]() перпендикулярна АВ.
перпендикулярна АВ.
Векторное уравнение ускорений для звена 3 (коромысла)
![]()
где ускорение
точки С ![]() ; нормальная составляющая ускорения точки В относительно точки С рассчитывается по формуле
; нормальная составляющая ускорения точки В относительно точки С рассчитывается по формуле ![]() .
.
Вектор ![]() направлен
параллельно отрезку ВС плана
механизма от В
к С, а вектор
направлен
параллельно отрезку ВС плана
механизма от В
к С, а вектор ![]() – перпендикулярно ВС.
– перпендикулярно ВС.
Выбираем
масштаб плана ускорений: ![]() ,
, ![]() , где pаа’ – длина отрезка,
изображающего ускорение
, где pаа’ – длина отрезка,
изображающего ускорение ![]() на плане ускорений.
Его длина выбирается произвольно из расчета, чтобы план ускорений разместился на отведенном месте чертежа и численное значение
на плане ускорений.
Его длина выбирается произвольно из расчета, чтобы план ускорений разместился на отведенном месте чертежа и численное значение ![]() было удобным
для расчетов (
было удобным
для расчетов (![]() должно быть круглым
числом).
должно быть круглым
числом).
Тогда
ускорение ![]() будет изображаться на
плане ускорений вектором, имеющим длину
будет изображаться на
плане ускорений вектором, имеющим длину ![]() , мм, а ускорение
, мм, а ускорение ![]() – вектором длиной
– вектором длиной ![]() , мм.
, мм.
Затем строится
план ускорений (рис. 3.8) с использованием составленных векторных уравнений
ускорений. Из произвольно выбранного полюса Ра
параллельно отрезку ОА плана
механизма проводится вектор ускорения ![]() , длина которого Раа′
была выбрана произвольно при расчете масштаба
, длина которого Раа′
была выбрана произвольно при расчете масштаба ![]() . Из конца этого вектора (точки а′) проводится вектор ускорения
. Из конца этого вектора (точки а′) проводится вектор ускорения ![]() длиной а′n2,
который должен быть параллелен отрезку АВ
плана механизма и направлен от точки В к точке А.
Перпендикулярно ему через точку n2 проводят
прямую. Затем из полюса Ра
проводят вектор ускорения
длиной а′n2,
который должен быть параллелен отрезку АВ
плана механизма и направлен от точки В к точке А.
Перпендикулярно ему через точку n2 проводят
прямую. Затем из полюса Ра
проводят вектор ускорения ![]() длиной Раn3.
Перпендикулярно ему через точку n3 проводят
прямую до пересечения с прямой, проведенной через
точку n2 перпендикулярно отрезку АВ. Точка пересечения обозначается буквой b′,
которая, будучи соединена с полюсом Ра,
образует отрезок Раb′, изображающий вектор полного ускорения точки В.
длиной Раn3.
Перпендикулярно ему через точку n3 проводят
прямую до пересечения с прямой, проведенной через
точку n2 перпендикулярно отрезку АВ. Точка пересечения обозначается буквой b′,
которая, будучи соединена с полюсом Ра,
образует отрезок Раb′, изображающий вектор полного ускорения точки В.
Используя план ускорений, можно вычислить ускорения
![]() ,
, ![]() .
.
Запишем
![]() ,
,
где ![]() и
и ![]() – угловые скорость и
ускорение шатуна.
– угловые скорость и
ускорение шатуна.
![]()
где ![]() и
и ![]() не зависят от выбора (расположения) полюса Ра плана
ускорений, а отношение масштабов постоянно (
не зависят от выбора (расположения) полюса Ра плана
ускорений, а отношение масштабов постоянно (![]() ) для данного плана ускорений. Поэтому для любой точки
(например, К, принадлежащей шатуну)
можно записать пропорции
) для данного плана ускорений. Поэтому для любой точки
(например, К, принадлежащей шатуну)
можно записать пропорции
![]() .
.
Отсюда
формулируется теорема подобия: отрезки
полных относительных ускорений на плане ускорений образуют фигуру, подобную
соответствующей фигуре звена на плане механизма.
Величину
ускорения точки К
можно вычислить по формуле
![]() .
.
Угловые
ускорения звеньев шатуна ![]() , c-1,
направление
, c-1,
направление ![]() определяются по
определяются по ![]() ; угловые ускорения звеньев коромысла
; угловые ускорения звеньев коромысла ![]() , c-1,
направление
, c-1,
направление ![]() – по
– по
![]() .
.
Так как ![]() и
и ![]() направлены в
противоположные стороны, вращение шатуна является замедленным.
направлены в
противоположные стороны, вращение шатуна является замедленным.
Использование
плана скоростей и плана ускорений для определения радиуса кривизны траектории
движения
точки
Радиус
кривизны траектории движения точки (например, точки К) можно вычислить по формуле
![]() ,
,
где ![]() – нормальная
составляющая ускорения точки К.
– нормальная
составляющая ускорения точки К.
Для
определения величины (и направления) ![]() следует вектор полного
ускорения
следует вектор полного
ускорения ![]() на плане ускорений
разложить на нормальную и тангенциальную составляющие,
причём
на плане ускорений
разложить на нормальную и тангенциальную составляющие,
причём ![]() перпендикулярна
вектору скорости
перпендикулярна
вектору скорости ![]() ,
, ![]() параллельна
последнему. Для этого сначала через полюс плана ускорений Ра проводится прямая, параллельная вектору скорости
точки К, а
через точку k` – перпендикуляр к этой прямой; на
их пересечении получают точку m.
параллельна
последнему. Для этого сначала через полюс плана ускорений Ра проводится прямая, параллельная вектору скорости
точки К, а
через точку k` – перпендикуляр к этой прямой; на
их пересечении получают точку m.

Рис. 3.8. План механизма,
скоростей, ускорений
Использование
плана скоростей и плана ускорений для определения мгновенного центра скоростей
(МЦС)
и
мгновенного центра ускорений (МЦУ) звена
Для определения МЦС и МЦУ используют теорему подобия, а на плане механизма строят фигуры, подобные фигурам (треугольникам) на планах скоростей и ускорений (рис. 3.9).

Рис. 3.9. Определение положений
мгновенных центров скоростей PV2
и ускорений Ра2 шатуна
Из теоретической механики известно, что плоскопараллельное движение звена механизма в каждый момент времени может быть представлено как вращение вокруг некоторой точки, которую называют мгновенным центром вращения или мгновенным центром скоростей (МЦС). Если данная точка относится к станине (стойке) механизма, т.е. является неподвижной, то соответствующий МЦС называют мгновенным центром скоростей в абсолютном движении рассматриваемого звена. Таким образом, если мы представим, что точка PV2 принадлежит шатуну (рис. 3.9), то её скорость будет равна нулю.
Если же рассматривается движение звена относительно любого подвижного звена механизма, то соответствующий МЦС называют мгновенным центром скоростей в относительном движении рассматриваемых звеньев.
Аналогично может быть найдена условная точка, принадлежащая звену, абсолютное ускорение которой в данный момент времени равно нулю. Эта точка называется мгновенным центром ускорений (МЦУ) звена. Если звено механизма совершает сложное плоскопараллельное движение, то меняются и положения МЦС и МЦУ.
Планы скоростей и
ускорений кривошипно-ползунного механизма
Последовательность
построения планов скоростей и ускорений кривошипно-ползунного механизма (рис.
3.10) аналогична той, которая приведена в предыдущем случае. В дальнейшем
некоторые подробности (расчёты масштабов, длин ![]() ,
масштабов планов скоростей
,
масштабов планов скоростей ![]() и ускорений
и ускорений ![]() и т.д.) будут пропущены.
и т.д.) будут пропущены.
План
скоростей кривошипно-ползунного механизма начинают строить после построения плана механизма в заданном положении,
в выбранном масштабе длин ![]() ,
составления векторного уравнения скоростей и выбора масштаба плана скоростей
,
составления векторного уравнения скоростей и выбора масштаба плана скоростей ![]() .
.
Векторное уравнение скоростей шатуна 2 (рис. 3.10)
![]()
где ![]() – скорость точки А, м/с; вектор этой скорости
направлен перпендикулярно прямой ОА
кривошипа 1 (рис. 3.10) на плане механизма; VВА –
вектор скорости точки В относительно А; имеет направление, перпендикулярное
прямой АВ на плане механизма; VВ – вектор полной (абсолютной),
скорости ползуна 3; должен быть параллельным направлению движения ползуна.
– скорость точки А, м/с; вектор этой скорости
направлен перпендикулярно прямой ОА
кривошипа 1 (рис. 3.10) на плане механизма; VВА –
вектор скорости точки В относительно А; имеет направление, перпендикулярное
прямой АВ на плане механизма; VВ – вектор полной (абсолютной),
скорости ползуна 3; должен быть параллельным направлению движения ползуна.
Для построения
плана скоростей сначала из полюса плана Рv (рис.
3.10) проводится вектор скорости точки А относительно О –
VА, т.е. векторный отрезок Рva. Затем через точку а проводится
перпендикуляр к прямой АВ плана
механизма и через полюс Рv
– прямая, параллельная движению ползуна 3. На пересечении этих двух
прямых получается точка b. Направления векторов скоростей VВ и VВА обозначают
стрелками.
Например, необходимо определить скорость точки S2, принадлежащей шатуну 2 и расположенной на середине отрезка АВ. Используя теорему подобия, на отрезке ab плана скоростей находят его середину (точка S2), которая, будучи соединенной с полюсом Рv, даст вектор VS2, изображающий абсолютную (полную) скорость точки S2.

Рис. 3.10. Построение планов скоростей и ускорений кривошипно-ползунного механизма
Рассчитаем величину линейных скоростей и угловую скорость шатуна:
![]() , м/с,
, м/с,
![]() , м/с,
, м/с,
![]() , м/с,
, м/с,
![]() , с-1.
, с-1.
Направление
вектора угловой скорости шатуна ![]() определяется следующим
образом. Вектор скорости VВА условно
переносится в точку В
плана механизма. Куда он будет вращать шатун относительно точки А, в ту сторону и
направлена угловая скорость
определяется следующим
образом. Вектор скорости VВА условно
переносится в точку В
плана механизма. Куда он будет вращать шатун относительно точки А, в ту сторону и
направлена угловая скорость ![]() шатуна.
шатуна.
План
ускорений кривошипно-ползунного механизма строят после того, как будет
составлено векторное уравнение ускорений шатуна, учитывая, что он совершает
сложное движение:
![]()
где аА –
ускорение точки А;
его величину и направление можно определить, используя векторное уравнение
ускорения точки А относительно оси О вращения кривошипа:
![]()
причём
ускорение точки А
относительно О можно разложить на две
составляющие – нормальное ускорение ![]() и тангенциальное
и тангенциальное ![]() , т.е.
, т.е.
![]()
Так как точка О неподвижна и
ускорение её равно нулю (![]() и
и ![]() при условии, что
угловая скорость вращения кривошипа постоянна:
при условии, что
угловая скорость вращения кривошипа постоянна: ![]() и его угловое ускорение
и его угловое ускорение
![]() ), то векторное уравнение ускорения точки А можно записать в виде
), то векторное уравнение ускорения точки А можно записать в виде
![]()
Величина
нормальной составляющей ускорения (нормальное ускорение) рассчитывается по
формуле
![]()
(его вектор направлен по радиусу вращения
кривошипа от точки А
к точке О).
Затем
вычисляется нормальное ускорение точки В относительно А
по формуле
![]()
(его вектор
направлен от В
к А).
После выбора
масштаба плана ускорений по формуле ![]()
величина
нормального ускорения ![]() переводится этим
масштабом в векторный отрезок длиной
переводится этим
масштабом в векторный отрезок длиной
 , мм.
, мм.
Затем строится
план ускорений (см. рис. 3.10). Из произвольно выбранного полюса Ра параллельно отрезку ОА плана механизма проводится вектор
ускорения ![]() , длина которого
, длина которого ![]() была выбрана
произвольно при расчёте масштаба
была выбрана
произвольно при расчёте масштаба ![]() . Из конца этого вектора (точки
. Из конца этого вектора (точки ![]() ) проводится вектор ускорения
) проводится вектор ускорения ![]() длиной
длиной ![]() , который должен быть параллелен отрезку АВ плана механизма и направлен от точки В к А. Перпендикулярно ему через точку n2 проводят прямую до пересечения с прямой, проведённой
через полюс Ра параллельно
линии движения ползуна 3. Полученная точка их пересечения b'
определяет длины векторов ускорений aBA
и aB.
, который должен быть параллелен отрезку АВ плана механизма и направлен от точки В к А. Перпендикулярно ему через точку n2 проводят прямую до пересечения с прямой, проведённой
через полюс Ра параллельно
линии движения ползуна 3. Полученная точка их пересечения b'
определяет длины векторов ускорений aBA
и aB.
Для нахождения величины ускорения точки S2, принадлежащей шатуну, можно применить теорему подобия. При этом необходимо на векторе, изображающем на плане ускорений относительное ускорение aBA, найти соответствующую точку S2', делящую отрезок a'b' в той же пропорции, что и точка S2 делит отрезок АВ на плане механизма.
Угловое
ускорение шатуна вычисляется по формуле
![]() , с-1,
, с-1,
где n2b' – длина вектора на
плане ускорений, изображающего тангенциальное ускорение ![]() .
.
Для
определения направления вектора углового ускорения шатуна ![]() необходимо вектор тангенциального ускорения
необходимо вектор тангенциального ускорения ![]() условно перенести в
точку В
плана механизма. Куда он будет вращать шатун относительно точки А, в ту сторону и
направлено ускорение
условно перенести в
точку В
плана механизма. Куда он будет вращать шатун относительно точки А, в ту сторону и
направлено ускорение ![]() шатуна.
шатуна.
Планы скоростей и
ускорений кулисного механизма
Чтобы
построить план скоростей, необходимо составить векторное уравнение
скоростей. При этом следует иметь в виду, что точка А1 (рис.3.11), принадлежащая кривошипу 1, и точка А2, принадлежащая ползуну 2 и
совпадающая на плане механизма с точкой А1,
вращаются вокруг оси О
с одинаковыми линейными и угловыми скоростями:
![]() и
и ![]() .
.
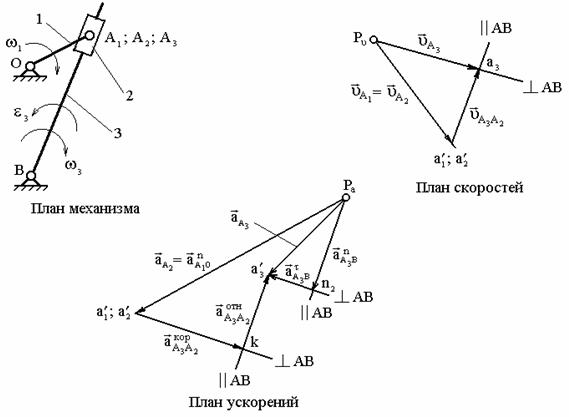
Рис. 3.11. Построение планов скоростей и ускорений кулисного механизма
Если задана
величина ![]() , то величину линейной скорости рассчитывают по формуле
, то величину линейной скорости рассчитывают по формуле
![]() , м/с.
, м/с.
Векторы
скоростей ![]() и
и ![]() направлены перпендикулярно радиусу ОА1. Скорость точки
направлены перпендикулярно радиусу ОА1. Скорость точки ![]() , принадлежащей кулисе 3, можно найти по векторному уравнению
скоростей
, принадлежащей кулисе 3, можно найти по векторному уравнению
скоростей
![]()
где ![]() – вектор скорости точки А3 кулисы относительно точки А2
ползуна, параллельный прямой А1В
плана механизма.
– вектор скорости точки А3 кулисы относительно точки А2
ползуна, параллельный прямой А1В
плана механизма.
После выбора
масштаба плана скоростей ![]() (см. предыдущие
примеры механизмов) строят план скоростей. Из полюса Рv (см. рис. 3.11)
перпендикулярно отрезку ОА плана
механизма проводится вектор скорости
(см. предыдущие
примеры механизмов) строят план скоростей. Из полюса Рv (см. рис. 3.11)
перпендикулярно отрезку ОА плана
механизма проводится вектор скорости ![]() , совпадающий с вектором скорости
, совпадающий с вектором скорости ![]() (см. рис. 3.11,
вектор
(см. рис. 3.11,
вектор ![]() ). Через точку а1 проводят прямую, параллельную прямой А1В, а через полюс Рv – прямую, перпендикулярную
А1В. На их пересечении
получают точку а3 и
наносят направление векторов (стрелки), руководствуясь векторным уравнением
скоростей.
). Через точку а1 проводят прямую, параллельную прямой А1В, а через полюс Рv – прямую, перпендикулярную
А1В. На их пересечении
получают точку а3 и
наносят направление векторов (стрелки), руководствуясь векторным уравнением
скоростей.
Вычисляют величины скоростей:
![]() , м/с,
, м/с,
![]() , м/с,
, м/с,
где ![]() и
и ![]() – длины векторов,
измеренные на плане скоростей.
– длины векторов,
измеренные на плане скоростей.
Угловая скорость коромысла 3 вычисляется по формуле
![]() ,с-1.
,с-1.
Для построения
плана ускорений составляются векторные уравнения
![]()
![]()
где ![]() – ускорение ползуна;
– ускорение ползуна; ![]() – ускорение Кориолиса
точки А3 относительно А2 (возникает тогда, когда
есть относительное движение двух точек с одновременным вращением их вокруг
какой-либо оси; в данном случае точка А3
движется относительно А2,
вместе они вращаются вокруг неподвижной точки В; направление вектора
– ускорение Кориолиса
точки А3 относительно А2 (возникает тогда, когда
есть относительное движение двух точек с одновременным вращением их вокруг
какой-либо оси; в данном случае точка А3
движется относительно А2,
вместе они вращаются вокруг неподвижной точки В; направление вектора ![]() определяется так:
необходимо условно повернуть вектор скорости
определяется так:
необходимо условно повернуть вектор скорости ![]() по направлению вращения кулисы 3 – это и будет направление
ускорения Кориолиса);
по направлению вращения кулисы 3 – это и будет направление
ускорения Кориолиса); ![]() – относительное
ускорение точки А3
относительно А2 (его
вектор параллелен А3В);
– относительное
ускорение точки А3
относительно А2 (его
вектор параллелен А3В); ![]() – ускорение точки В (
– ускорение точки В (![]() , так как точка В неподвижна);
, так как точка В неподвижна); ![]() – нормальное ускорение
точки А3 относительно В (направление вектора от А3 к точке В);
– нормальное ускорение
точки А3 относительно В (направление вектора от А3 к точке В); ![]() – тангенциальное
ускорение точки А3 относительно
В (вектор направлен перпендикулярно А3В).
– тангенциальное
ускорение точки А3 относительно
В (вектор направлен перпендикулярно А3В).
Вычисление величины
ускорения Кориолиса и нормальных ускорений можно произвести по формулам
![]() м/с2,
м/с2,
![]() м/с2,
м/с2,
![]() м/с2.
м/с2.
Масштаб плана
ускорений выбирают, используя формулу
![]() ,
, ![]() ,
,
где Ра а'2 – длина
вектора, изображающего ускорение ![]() на плане ускорений; она выбирается произвольно
с таким расчётом, чтобы будущий план ускорений разместился на отведённом месте
чертежа и масштаб был удобен для использования в дальнейших расчётах.
на плане ускорений; она выбирается произвольно
с таким расчётом, чтобы будущий план ускорений разместился на отведённом месте
чертежа и масштаб был удобен для использования в дальнейших расчётах.
Остальные известные величины ускорений переводятся масштабом в векторные отрезки соответствующих длин:
![]() , мм;
, мм; ![]() , мм.
, мм.
Затем строится план ускорений. Из
произвольно выбранного полюса – точки Ра – проводится вектор ускорения ![]() с длиной Раа'2. Из точки а'2 перпендикулярно А2В проводится вектор
ускорения
с длиной Раа'2. Из точки а'2 перпендикулярно А2В проводится вектор
ускорения ![]() с длиной a'2k. Через точку k проводится прямая, перпендикулярная
этому вектору. Таким образом, будет выполнено графическое изображение первого векторного
уравнения ускорений из двух, ранее составленных. Затем приступают к построению
второго векторного уравнения. Из полюса Ра
параллельно прямой А3В
проводится вектор ускорения
с длиной a'2k. Через точку k проводится прямая, перпендикулярная
этому вектору. Таким образом, будет выполнено графическое изображение первого векторного
уравнения ускорений из двух, ранее составленных. Затем приступают к построению
второго векторного уравнения. Из полюса Ра
параллельно прямой А3В
проводится вектор ускорения ![]() длиной Раn2,
а через точку n2 – перпендикулярная
ему прямая до пересечения с прямой, проведённой ранее через точку k. На пересечении этих прямых получается точка а'3. Вектор, соединяющий
точки Ра и а'3, – полное ускорение аА3 точки А3.
длиной Раn2,
а через точку n2 – перпендикулярная
ему прямая до пересечения с прямой, проведённой ранее через точку k. На пересечении этих прямых получается точка а'3. Вектор, соединяющий
точки Ра и а'3, – полное ускорение аА3 точки А3.
Угловое
ускорение кулисы вычисляется по формуле
![]() с-2,
с-2,
где n2a'3 – длина вектора, изображающего на плане ускорений тангенциальное ускорение точки А3.
Направление
углового ускорения определяется, как и в предыдущем примере (для
кривошипно-ползунного механизма), по направлению условного вращения кулисы 3
вектором ускорения ![]() : условно перенести этот вектор в точку А3 плана механизма и посмотреть, в каком
направлении он будет «вращать» кулису.
: условно перенести этот вектор в точку А3 плана механизма и посмотреть, в каком
направлении он будет «вращать» кулису.
Аналитический метод
кинематического анализа
Общие сведения о методе
Графический (метод диаграмм) и графоаналитический методы (метод планов скоростей и ускорений) кинематического анализа механизмов имеют недостатки: невысокая точность, определяемая точностью графических построений, и большая трудоёмкость. При иcпользовании графического метода необходимо построить диаграммы перемещений, скоростей и ускорений для каждой исследуемой точки механизма, а при использовании графоаналитического метода – несколько планов скоростей и ускорений механизма, чтобы определить динамику изменения скорости и ускорения интересующих нас точек (т.е. при различных положениях механизма).
Эти недостатки отсутствуют в аналитическом методе. Но при этом необходимо составлять достаточно сложные аналитические зависимости (формулы) и иметь возможность решать их с использованием компьютерных техники и технологии, что в последнее время возможно и доступно.
Методы аналитического исследования:
метод замкнутых векторных контуров (метод Зиновьева) удобен для кинематического анализа практически всех используемых в технике несложных рычажных механизмов;
метод преобразования координат (метод Морошкина) удобен для кинематического анализа многозвенных механизмов типа манипуляторов промышленных роботов.
Прежде чем говорить об аналитическом методе, введем некоторые понятия и определения.
Функция положения. Аналог скорости.
Аналог ускорения
Положение
любого звена механизма может определяться параметрами: углом ![]() относительно
какой-либо координатной оси или координатами ХК и YК (рис. 3.12).
относительно
какой-либо координатной оси или координатами ХК и YК (рис. 3.12).

Рис. 3.12. Схема механизма
Функция
положения – это аналитическая зависимость положения или координаты К-го звена (![]() , ХК или
YК ) от положения
ведущего звена
, ХК или
YК ) от положения
ведущего звена ![]() , т.е.
, т.е. ![]() или
или ![]() и
и ![]() , где
, где ![]() , XK и
YK –
координаты, определяющие положение К-го
звена (ведомого), а угол
, XK и
YK –
координаты, определяющие положение К-го
звена (ведомого), а угол ![]() – угол, характеризующий
положение ведущего звена.
– угол, характеризующий
положение ведущего звена.
Аналог
скорости. Угловая скорость К-го
звена определяется зависимостью
![]() , (3)
, (3)
где ![]() – аналог скорости К-го
звена (первая передаточная функция) для вращающегося звена, величина безразмерная;
– аналог скорости К-го
звена (первая передаточная функция) для вращающегося звена, величина безразмерная;
![]() и
и ![]() – аналоги скорости К-го звена, движущегося поступательно,
величины безразмерные.
– аналоги скорости К-го звена, движущегося поступательно,
величины безразмерные.
Аналог
ускорения. Угловая скорость К-го
звена определяется зависимостью, получаемой дифференцированием уравнения (3) по
dt:
![]() .
.
При
дифференцировании предполагается, что угловая скорость К-го звена ![]() определяется
зависимостью
определяется
зависимостью
![]() ,
,
а угол ![]() является функцией угла
является функцией угла ![]() :
:
![]() .
.
Величина ![]() – аналог ускорения К-го
звена, совершающего вращательное движение, величины
– аналог ускорения К-го
звена, совершающего вращательное движение, величины ![]() и
и ![]() – аналоги ускорения К-го
звена, двигающегося поступательно, в проекциях на оси X и Y.
– аналоги ускорения К-го
звена, двигающегося поступательно, в проекциях на оси X и Y.
Введение в
кинематический анализ понятий аналогов отделяет геометрические свойства
механизма от кинематических.
Величину ![]() называют ещё передаточным
отношением, так как выражение
называют ещё передаточным
отношением, так как выражение
![]() можно преобразовать,
умножив и разделив его на величину dt:
можно преобразовать,
умножив и разделив его на величину dt:
![]()
Отношение угловых скоростей в механике
называют передаточным отношением ![]() .
.
Аналог скорости звена также называют первой передаточной функцией.
Задачи кинематического анализа и пути их аналитического решения приведены в таблице.
|
Функции положения |
Задача о скоростях |
Задача об ускорения |
|
Определить функции положения: |
Определение аналогов скоростей
Вычисление скоростей
|
Определение аналогов ускорений
Вычисление ускорений
|


Как следует из
приведенной таблицы, для решения задачи о положениях звеньев
исследуемого механизма необходимо найти функции положения (![]() или ХК и
YК ), предварительно
составив векторное уравнение замкнутого векторного контура кинематической цепи
и уравнения проекций его на координатные оси Х и Y. Из этих уравнений находят функции
положения (зависимости положений исследуемого звена от положения ведущего
звена). При известном (заданном) законе движения ведущего звена задаются шагом
и вычисляют координаты исследуемых звеньев (угловые координаты для вращающегося
звена и прямоугольные для звена, совершающего возвратно-поступательное
движение).
или ХК и
YК ), предварительно
составив векторное уравнение замкнутого векторного контура кинематической цепи
и уравнения проекций его на координатные оси Х и Y. Из этих уравнений находят функции
положения (зависимости положений исследуемого звена от положения ведущего
звена). При известном (заданном) законе движения ведущего звена задаются шагом
и вычисляют координаты исследуемых звеньев (угловые координаты для вращающегося
звена и прямоугольные для звена, совершающего возвратно-поступательное
движение).
Для решения задачи о скоростях необходимо найти аналоги скоростей исследуемых звеньев и, умножив их на угловую скорость ведущего звена, получить формулы расчета искомых скоростей.
Для решения задачи об ускорениях находят также аналоги ускорений звеньев и по формулам, приведенным в таблице, находят величины ускорений. Ниже приводится пример кинематического анализа кривошипно-ползунного механизма аналитическим методом.
Аналитическое
исследование кривошипно-ползунного механизма
Аналитическое
исследование кривошипно-ползунного механизма используется в двигателях
внутреннего сгорания, насосах, компрессорах.
Различают две
схемы кривошипно-ползунных механизмов: нормальный или центральный
кривошипно-ползунный механизм (рис.3.13, а)
и дизоксиальный кривошипно-ползунный механизм
(рис.3.13, б).

а) б)
Рис.3.13
Величина ![]() называется смещением дизоксиальности. Если в дизоксиальном
кривошипно-ползунном механизме сделать смещение дизоксиальности
равным нулю, то получится нормальный кривошипно-ползунный механизм.
называется смещением дизоксиальности. Если в дизоксиальном
кривошипно-ползунном механизме сделать смещение дизоксиальности
равным нулю, то получится нормальный кривошипно-ползунный механизм.
Кривошипно-ползунные
механизмы предназначены для преобразования вращательного движения кривошипа в
поступательное движение ползуна (насосы, компрессоры, механизмы шаговой
подачи), или для преобразования возвратно-поступательного движения ползуна во
вращательное движение коромысла (двигатели внутреннего сгорания).
Пример 4. Аналитическое исследование механизма с ведущим кривошипом.
Дано: ![]() ,
, ![]() ,
, ![]() ,
, ![]() (рис.3.14).
(рис.3.14).

Рис.3.14
Решение:
Скорость точки
![]() равна нулю.
равна нулю.
Модуль
скорости точки ![]() можно найти по
формуле:
можно найти по
формуле: ![]() , а линия действия вектора скорости точки
, а линия действия вектора скорости точки ![]() перпендикулярна звену
перпендикулярна звену ![]() .
.
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
 ;
;
 .
.
Получили
формулу:  , скорость точки
, скорость точки ![]() можно получить с помощью
формулы
можно получить с помощью
формулы ![]() , а ускорение точки
, а ускорение точки ![]() можно получить с
помощью формулы
можно получить с
помощью формулы ![]() .
.
Понятия
о мёртвых положениях в кривошипно-ползунных механизмах и способы их прохождения
Рассмотрим
случай, когда ведущим звеном является ползун. В этом случае происходит
преобразование поступательного движения ползуна во вращательное движение
ползуна (рис.3.15).

Рис.3.15
В таких механизмах, в момент,
когда кривошип и шатун находятся на одной прямой, то вывести механизм из
состояния неподвижности ползун не может.
Работу точки ![]() можно найти по
формуле:
можно найти по
формуле: ![]() .
.
На рис.3.16
угол между силой ![]() и вектором скоростью
точки
и вектором скоростью
точки ![]() составляет 90
градусов, следовательно
составляет 90
градусов, следовательно ![]() , то есть как бы не была велика сила
, то есть как бы не была велика сила
![]() вывести механизм из
этого положения она не может.
вывести механизм из
этого положения она не может.
Положения
механизма, представленные на рис.3.16 и рис.3.17 из-за невозможности движения
под действием силы ![]() принято называть мёртвым
положением.
принято называть мёртвым
положением.


Рис.3.16
Рис.3.17
Существует два
способа прохождения мёртвых положений: динамический и кинематический.
При динамическом
методе на вал кривошипа одевается маховик.
Маховик – колесо со значительной массой, девяносто процентов которой сосредоточено в ободе этого колеса (рис.3.18).

Рис.3.18
Таким образом,
маховик является аккумулятором энергии, получаемой от механизма, когда
положение звеньев представляет наилучшее для работы состояние. Поскольку масса
маховика значительна, то при прохождении мёртвого положения кинетическая
энергия маховика проворачивает кривошип. Дальше действует сила ползуна.
Кинематический
способ используется в тех случаях, когда большие массы маховиков
недопустимы. Этот способ заключается в том, что кривошипы нескольких одинаковых
механизмов жёстко связаны между собой образуя коленчатый вал. У этих кривошипов
общая ось вращения, но расположены они под углом друг к другу, чтобы при
мёртвом положении одного механизма, другой имел более благоприятное положение,
и проворачивал коленчатый вал остальных механизмов. В этом случае также могут
быть использованы маховики, но они будут иметь очень незначительную массу.
На рис.3.19
первый и третий механизмы находятся в мёртвых положениях, а второй и четвёртый
механизмы находятся в наилучших положениях.

Рис.3.19
Пример 5.
Используем
метод замкнутых векторных контуров (рис. 3.7).

Рис. 3.20. Замкнутый векторный контур
кривошипно-ползунного механизма
Решение:
Рассмотрим
замкнутый векторный контур OABCO. Соблюдая
единообразие отсчёта углов, определяющих положение звеньев, составим векторное
уравнение
![]() . (4)
. (4)
Спроектируем
(4) на координатные оси Х и Y:
![]() (5) – (6)
(5) – (6)
Решение задачи о положениях
Определим
функции положения ползуна ![]() и шатуна
и шатуна ![]() . Из (6) получаем
. Из (6) получаем ![]() , откуда
, откуда ![]() , из (5) получаем
, из (5) получаем ![]() .
.
Решение задачи о скоростях
Определим
аналог скорости ползуна ![]() и шатуна
и шатуна ![]() , для чего продифференцируем уравнение (5) и (6):
, для чего продифференцируем уравнение (5) и (6):
 (7) -
(8)
(7) -
(8)
Из (8)
получаем аналог скорости шатуна
 ,
,
тогда угловая
скорость шатуна ![]() .
.
Из (7)
получаем аналог скорости ползуна
 ,
,
тогда скорость
ползуна вычисляется по формуле ![]() .
.
Решение задачи
об ускорениях
Определим
аналоги ускорений шатуна ![]() и ползуна
и ползуна ![]() , для чего продифференцируем уравнения по
, для чего продифференцируем уравнения по ![]() (7) и (8):
(7) и (8):
 (9) - (10)
(9) - (10)
Из (10)
получим аналог ускорения шатуна ![]() , тогда угловое ускорение шатуна можно вычислить по формуле
, тогда угловое ускорение шатуна можно вычислить по формуле
![]() .
.
Из (9) получим
аналог ускорения ползуна ![]() , тогда ускорение ползуна можно вычислить по формуле
, тогда ускорение ползуна можно вычислить по формуле
![]() .
.
Аналитическое
исследование шарнирного четырёхзвенного механизма

Рис.3.21
При ведущем
кривошипе рабочим ведомым звеном является чаще всего коромысло ![]() (рис.3.21). Чтобы
найти зависимость угла поворота ведомого звена от
ведущего аналитическим способом пользуются следующей формулой (рис.3.22):
(рис.3.21). Чтобы
найти зависимость угла поворота ведомого звена от
ведущего аналитическим способом пользуются следующей формулой (рис.3.22):
 .
.

Рис.3.22
Аналитическое
исследование кривошипно-кулисного механизма
Основным
элементом кривошипно-кулисных механизмов является кулиса.
Кулиса
– подвижная направляющая ползуна.
Кулисы бывают
прямолинейные и изогнутые (рис.3.23). Конструктивно они бывают выполнены в виде
стержней или рамных направляющих.

Рис.3.23
По принципу
действия кривошипно-кулисные механизмы бывают следующих видов: механизмы с
возвратно-поступательным вращением кулисы, механизмы с вращательным движением
кулисы.
Рассмотрим
механизм с поступательным вращением кулисы (рис.3.24).
1 – кривошип.
2 – ползун
(камень).
3 – кулиса.
![]() ;
;
![]() ;
; ![]() .
.

Рис.3.24
Назначением
таково механизма является преобразование вращательного движения кривошипа в
возвратно-поступательное движение кулисы.
Кулисный
механизм с вращающейся головкой (рис.3.25).

Рис.3.25
1 – кривошип.
2 – ползун.
3 – качающаяся
кулиса.
Этот механизм
предназначен для преобразования вращающегося движения кривошипа в колебательное
или вращательное движение кулисы (рис.3.26).

Рис.3.26
Зададим ![]() .
.
![]() - угол поворота
кривошипа при переходе кулисы из крайнего правого в крайнее левое положение.
- угол поворота
кривошипа при переходе кулисы из крайнего правого в крайнее левое положение.
![]() - угол поворота
кривошипа при переходе кулисы из крайнего левого в крайнее правое положение.
- угол поворота
кривошипа при переходе кулисы из крайнего левого в крайнее правое положение.
Очевидно, что
угол ![]() больше угла
больше угла ![]() . Так как
. Так как ![]() , то
, то ![]() , а
, а ![]() ;
;
![]() или
или ![]() . Так как
. Так как ![]() , то
, то ![]() . Это означает, что прохождения кулисы влево и вправо различны,
то есть влево кулиса двигается медленнее, чем вправо.
. Это означает, что прохождения кулисы влево и вправо различны,
то есть влево кулиса двигается медленнее, чем вправо.
Средняя
скорость точки ![]() :
: ![]() ;
; ![]() .
.
Путь ![]() .
.
![]() ;
; ![]() .
.
Найдём
зависимость угла поворота кулисы от угла поворота кривошипа:
![]() ;
;  .
.
![]() ;
;
![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
; ![]() .
.
Выше были
рассмотрены механизмы, у которых радиус кривошипа ![]() был меньше чем
межцентровое расстояние
был меньше чем
межцентровое расстояние ![]() . В этих механизмах кулиса совершала колебательные движения.
. В этих механизмах кулиса совершала колебательные движения.
Рассмотрим
вариант, когда радиус кривошипа будет больше межцентрового расстояния ![]() (рис.3.27). В этом случае центр вращения кулисы – точка
(рис.3.27). В этом случае центр вращения кулисы – точка ![]() будет находиться
внутри кривошипной окружности, очерчиваемой шарниром
будет находиться
внутри кривошипной окружности, очерчиваемой шарниром ![]() кривошипа. Такие механизмы
имеют вращающуюся кулису.
кривошипа. Такие механизмы
имеют вращающуюся кулису.
Так как радиус
![]() величина переменная,
то угловая скорость кулисы
величина переменная,
то угловая скорость кулисы ![]() тоже будет величиной
переменной. Верхнюю часть окружности кулиса проходит медленнее, чем нижнюю
тоже будет величиной
переменной. Верхнюю часть окружности кулиса проходит медленнее, чем нижнюю

Рис.3.27
- Цель кинематического анализа механизмов.
- Сформулируйте задачи кинематического анализа механизмов с низшими парами.
- Перечислите методы исследования кинематики механизмов.
- Что должно быть задано для исследования кинематики механизма?
- Должен ли предшествовать кинематическому анализу структурный анализ механизма?
- Какие задачи решают с помощью методов кинематического анализа механизмов?
- В чем заключается сущность аналитического метода исследования кинематики?
- Какие звенья механизма могут быть приняты входными?
- Дайте определение звеньям механизма: кривошип, шатун, коромысло, ползун.
- Что называется масштабом в ТММ?
- Что такое разметка механизма?
- Для чего строится разметка?
- Что называется "функцией положения" для звена или точки механизма?
- Какие параметры называют кинематическими характеристиками?
- В чем различие между кинематическими и геометрическими характеристиками механизма?
- Какие функции называются кинематическими передаточными функциями механизма?
- Какие передаточные функции механизма называются главными, а какие вспомогательными?
- Перечислите методы геометро-кинематического исследования механизмов?
- Напишите формулы, устанавливающие связь между геометрическими и кинематическими характеристиками механизма?
- Изложите суть метода "проекций векторного контура"?
- Что называется циклом?
- Что называется "центроидой", как центроиды используются при кинематическом исследовании механизма?
- Как метод кинематических диаграмм применяется при кинематическом исследовании механизмов?
- Как применяется метод преобразования координат при решении прямой задачи о положении точки выходного звена?
- Как кинематические характеристики определяются экспериментально?
- В чем заключается сущность анализа механизмов методом кинематических диаграмм?
- Опишите последовательность кинематического анализа плоского механизма.
- В чем заключается сущность кинематического анализа механизмов методом планов скоростей и ускорений?
- Что называется планом механизма?
- Как определяется масштаб графических построений при графоаналитическом методе кинематического анализа?
- Как построить графически траектории движения точки кривошипа, коромысла, шатуна, ползуна?
- Что понимается под термином "скорость"?
- Что понимается под термином "ускорение"?
- Как определить скорости точек звеньев механизма графоаналитическим методом?
- Как найти величину и направление угловых скоростей звеньев механизма?
- Как направлены нормальные и тангенциальные ускорения точек звеньев механизма?
- Как определить полные относительные и абсолютные ускорения точек звеньев механизма?
- Как определить величину и направление угловых ускорений звеньев механизма?
- Как определяются скорость и ускорение конца кривошипа?
- Назовите свойства планов скоростей.
- Какое свойство планов скоростей называется "свойством подобия"? Для чего оно используется?
- Назовите свойства планов ускорений.
- Запишите векторные уравнения для построения планов скоростей и ускорений и объясните их составляющие. Какое правило механики положено в основу этих уравнений?
- Как найти величину и направление ускорений центров масс звеньев?
- Как определяются скорости и ускорения центра масс шатуна?
- Как определить угловые скорость и ускорения стержневого звена?
- Запишите уравнения планов скоростей и ускорений для любой структурной группы II класса, содержащей внутреннюю поступательную пару.
- Запишите уравнения планов скоростей и ускорений для любой структурной группы II класса, содержащей хотя бы одну внешнюю поступательную пару.
- Как определяют величину и направление ускорения Кориолиса?
- В каких случаях при построении планов скоростей и ускорений применяют метод подобия?
- В чем заключается аналитический метод кинематического анализа?
- Как определить угловые скорости звеньев аналитическим методом?
- Как определить угловые ускорения звеньев аналитическим методом?
- Как определяются скорости движения точек звеньев механизма?
- Как определяются ускорения движения точек звеньев механизма?
- Назовите задачи кинематического синтеза механизма.
- Назовите основные этапы синтеза механизмов.
- Что понимается под параметрами синтеза механизмов?
- Какие параметры технологического процесса могут быть заданы для синтеза кривошипно-ползунного механизма?
- Какие параметры технологического процесса могут быть заданы для синтеза кривошипно-коромыслового механизма?
- Какие эксплуатационные параметры могут быть заданы для синтеза шарнирно-рычажных механизмов?
- Какие разновидности имеет шарнирный четырехзвенный механизм в зависимости от видов движения звеньев?
- Сформулируйте условие, при котором шарнирный четырехзвенник будет двухкривошипным.
- Какой угол называется углом размаха коромысла?
- Как определяются фазовые углы в механимзе?
- Траекторию движения какой точки называют шатунной кривой?
- Какое преобразование движения осуществляет кривошипно-ползунный механизм?
- В каком случае кривошипно-ползунный механизм называется дезаксиальным?
- Какой параметр называют ходом ползуна?
- Сформулируйте условие проворачиваемости кривошипа в дезаксиальном кривошипно-ползунном механимзе.
- Дайте определение угла давления.
- Какие последствия для работы механизма влечет увеличение угла давления?
- Какую зависимость называют функцией положения механизма?
- Дайте определение кинематических передаточных функций.
- Что называется коэффициентом возрастания скорости обратного (холостого) хода выходного звена?
- Что называется коэффициентом пика скорости выходного звена?
- Как определить угол поворота кривошипа за рабочий (прямой) и холостой (обратный) ход ползуна?
- Как определить угол поворота кривошипа за рабочий (прямой) и холостой (обратный) ход коромысла?
- За счет чего при постоянной угловой скорости кривошипа возрастает средняя скорость обратного хода выходного звена?
- По какому признаку можно установить, является ли равномерным (или неравномерным) относительное движение звеньев, образующих поступательную пару?
Ответ: изучить движение звеньев механизма без учета сил, вызывающих это движение.
- Как называются графики, построенные по полученным значениям кинематических величин?
Ответ: кинематические диаграммы.
- Назовите численные значения масштаба.
Ответ: 1, 2, 2.5, 4, 5.
- Как называется чертеж, на котором изображены в виде отрезков векторы, равные по модулю и по направлению ускорениям различных точек звеньев механизма в данный момент?
Ответ: план ускорений.
- Единица измерения масштаба скорости.
Ответ: м сек-1/мм.
- Напишите формулу для определения численного значения нормальной составляющей ускорения любой точки кривошипа.
Ответ: ![]() .
.
- Как определить направления угловой скорости звена?
Ответ: угловая скорость и вектор относительной скорости направлены в одну сторону.
- Скорость самолета 2500 км/час. Сколько метров самолет пролетает за одну секунду?
Ответ: 694,4 м/сек.
- Скорость автомобиля 80 км/час. Какой путь автомобиль пройдет за одну секунду?
Ответ: 22 м.
- Задачи кинематического анализа механизмов.
Ответ: определение перемещений звеньев и траекторий, описываемых точками звеньев; определение скоростей отдельных точек звеньев и угловых скоростей звеньев; определение ускорений отдельных точек звеньев и угловых ускорений звеньев.
- Понятие масштаба в ТММ.
Ответ: Масштаб это отношение действительной величины к отрезку в мм, который изображает эту величину на чертеже.
- Напишите формулу для определения численного значения скорости любой точки кривошипа.
Ответ: ![]() .
.
- Чем задается положение ведущего звена, если оно входит в поступательную пару?
Ответ: функцией перемещения s=s(t).
- Как определить направление углового ускорения звена?
Ответ: угловое ускорение направлено в сторону тангенциальной составляющей относительного ускорения.
- С какой целью определяют ускорения точек звеньев механизма?
Ответ: например, для определения силы инерции.
- Для каких целей строят кинематические диаграммы?
Ответ: для кинематического исследования механизма.
- Единица измерения масштаба времени.
Ответ: сек/мм.
- Чем определяется положение ведущего звена, если оно входит во вращательную пару со стойкой?
Ответ: функцией угла поворота ![]() .
.
- С какой целью определяют перемещения (траектории) точек звеньев механизма?
Ответ: для построения кинематических диаграмм, а также для выбора размеров корпусных деталей при проектировании механизма.
- Напишите формулу для
определения угловой скорости ![]() (рад/сек), если известна частота
вращения
(рад/сек), если известна частота
вращения ![]() (об/мин).
(об/мин).
Ответ: ![]() .
.
- Единица измерения масштаба длины.
Ответ: м/мм.
- Напишите формулу для определения численного значения тангенциальной составляющей ускорения любой точки кривошипа.
Ответ: ![]() .
.
- С какой целью определяют скорости точек звеньев механизма?
Ответ: например, для выбора типа смазки.
- Единица измерения масштаба угла поворота.
Ответ: град/мм или рад/мм.
- Что такое кинематические диаграммы?
Ответ: графики, построенные по полученным значениям кинематических величин.
- Что такое план скоростей?
Ответ: чертеж, на котором изображены в виде отрезков векторы, равные по модулю и по направлению скоростям различных точек звеньев механизма в данный момент.
- Что такое план ускорений?
Ответ: чертеж, на котором изображены в виде отрезков векторы, равные по модулю и по направлению ускорениям различных точек звеньев механизма в данный момент.
Задачи для самостоятельного решения
Задача 1
Для некоторой структурной группы имеется уравнение плана скоростей
![]() .
.
Написать для этой группы:
1) уравнение плана ускорений;
2) формулы для вычисления угловой скорости и углового ускорения звена 3.
Задача 2
Кривошип OA механизма вращается равномерно; обозначить полюс и все
векторы плана ускорений. Считая все постоянные размеры звеньев заданными,
нанести на этот план вектор ![]() ускорения точки C.
ускорения точки C.

Задача 3
Кривошип OA
механизма вращается равномерно; обозначить полюс и все векторы плана ускорений.
Считая все постоянные размеры звеньев заданными, указать на прямой AB звена 2 такую точку C, ускорение которой ![]() направлено, как
показано на рисунке (написать формулу, по которой вычисляется положение этой
точки на звене). Нанести соответствующую точку на план ускорений.
направлено, как
показано на рисунке (написать формулу, по которой вычисляется положение этой
точки на звене). Нанести соответствующую точку на план ускорений.

Задача 4
На плане скоростей
кривошипно-кулисного механизма отметить полюс и векторы скоростей всех
обозначенных на схеме точек. Найти для изображенного положения механизма точную
величину отношения (![]() ), если OA = OB.
), если OA = OB.

Задача 5
Для структурной группы имеется уравнение плана ускорений
![]() .
.
Написать для этой группы:
1) уравнение плана скоростей;
формулы для расчета угловой скорости ![]() и углового ускорения
и углового ускорения ![]() ;
;
2) формулы для расчета нормального и кориолисова ускорений.
Задача 6
В рассматриваемом положении
механизма звенья 1 и 3 вертикальны, звено 2 горизонтально. Звено 1 вращается
равномерно с угловой скоростью ![]() =10 рад / с. Длины
звеньев: AB = BC = 2OA. Найти величину и направление углового ускорения звена 2.
=10 рад / с. Длины
звеньев: AB = BC = 2OA. Найти величину и направление углового ускорения звена 2.

Задача 7
В рассматриваемом положении
механизма звенья 1 и 3 вертикальны, звено 2 горизонтально. Звено 1 вращается
равномерно с угловой скоростью ![]() =10 рад/с. Длины
звеньев: AB = BC = 2OA. Найти величину и направление углового ускорения звена 2.
=10 рад/с. Длины
звеньев: AB = BC = 2OA. Найти величину и направление углового ускорения звена 2.

Задача 8
Определить скорость и ускорение точки B звена 2; указать направления обоих векторов для заданного положения механизма.
Исходные данные: OA=0,20 м; AB=0,10 м; ![]() =5 рад/с; кривошип OA в текущем положении вертикален.
=5 рад/с; кривошип OA в текущем положении вертикален.

Задача 9
Для механизма крестово-кулисной
муфты определить скорость и ускорение точки B звена 3; указать
направления обоих векторов. В текущем положении механизма звено 1 вертикально и
вращается равномерно с угловой скоростью ![]() = 10 рад/с, звено 3 отклонено от вертикали на угол
= 10 рад/с, звено 3 отклонено от вертикали на угол ![]() =300. Размер АВ
= 0,3 м.
=300. Размер АВ
= 0,3 м.

Задача 10
В текущем положении механизма
угол ![]() ползун 1 движется
равномерно. Размеры звеньев: длина кривошипа
ползун 1 движется
равномерно. Размеры звеньев: длина кривошипа ![]() , длина шатуна
, длина шатуна ![]() . Определить точное соотношение угловых ускорений звеньев
. Определить точное соотношение угловых ускорений звеньев ![]() в указанном положении.
в указанном положении.

Задача 11 (см. рисунок к задаче 10)
Установить величину отношения
угловых ускорений звеньев 2 и 3 ![]() при равномерном
движении ползуна 1 в изображенном положении кривошипно-ползунного механизма
(т.е. при угле
при равномерном
движении ползуна 1 в изображенном положении кривошипно-ползунного механизма
(т.е. при угле ![]() ). Соотношение длин звеньев:
). Соотношение длин звеньев: ![]() .
.
Задача 12 (см. рисунок к задаче 10)
Доказать, что
при равномерном движении ползуна 1 в изображенном положении механизма (т.е. при
угле ![]() ) угловые ускорения звеньев 2 и 3 одинаковы по величине и
направлению.
) угловые ускорения звеньев 2 и 3 одинаковы по величине и
направлению.
Задача 13
Кривошип 1 вращается с угловым
ускорением ![]() =1 рад/с2; при каком
значении его угловой скорости
=1 рад/с2; при каком
значении его угловой скорости ![]() ползун 3 в рассматриваемом
положении механизма (т.е. при угле
ползун 3 в рассматриваемом
положении механизма (т.е. при угле ![]() ) будет двигаться равномерно?
Соотношение длин звеньев:
) будет двигаться равномерно?
Соотношение длин звеньев:
![]() .
.

Задача 14
Для кинематической цепи известны:
размеры звеньев BC и h;
положение, скорость ![]() и ускорение
и ускорение ![]() точки A; положение (угол a), угловая скорость
точки A; положение (угол a), угловая скорость ![]() и угловое ускорение
и угловое ускорение ![]() звена 2; положение,
скорость
звена 2; положение,
скорость ![]() и ускорение
и ускорение ![]() точки B. Описать порядок построения положения точки С; написать
уравнения планов скоростей и ускорений, в результате решения которых будут найдены
скорость и ускорение точки С, а также
угловая скорость и угловое ускорение звеньев 3 и 4.
точки B. Описать порядок построения положения точки С; написать
уравнения планов скоростей и ускорений, в результате решения которых будут найдены
скорость и ускорение точки С, а также
угловая скорость и угловое ускорение звеньев 3 и 4.

Задача 15
Для
кинематической цепи известны: размеры звеньев BC и h; положение, скорость ![]() и ускорение
и ускорение ![]() точки A; положение, скорость
точки A; положение, скорость ![]() и ускорение
и ускорение ![]() точки B. Написать совокупность векторных уравнений и скалярных
зависимостей для определения скорости и ускорения точки С.
точки B. Написать совокупность векторных уравнений и скалярных
зависимостей для определения скорости и ускорения точки С.

Задача 16
Взаимное расположение шарниров O и C таково, что при ![]() =450 звено AB горизонтально и OA
=450 звено AB горизонтально и OA![]() CB. Установить соотношения угловых
скоростей звеньев (
CB. Установить соотношения угловых
скоростей звеньев (![]() ) и (
) и (![]() ) для указанного положения механизма. Размеры звеньев: OA=AB=CB.
) для указанного положения механизма. Размеры звеньев: OA=AB=CB.

Задача 17
Размеры звеньев механизма: OA=AB=CB;
взаимное расположение шарниров O и C таково,
что при ![]() =450 звено AB горизонтально
и OA
=450 звено AB горизонтально
и OA![]() CB.
Установить соотношения угловых скоростей звеньев (
CB.
Установить соотношения угловых скоростей звеньев (![]() ) и (
) и (![]() ) для указанного положения механизма.
) для указанного положения механизма.

Задача 18
Написать все уравнения, необходимые для нахождения скорости и ускорения точки C звена 2 методом планов; при написании векторных уравнений указать, в какой мере известны те или иные векторы, входящие в него. Геометрические параметры звеньев считать заданными, а положения, скорости и ускорения точек A и B – известными для текущего момента времени.

Задача 19
Для секансного
механизма определить скорость точки A в положении,
определяемом углом ![]() =450. Размер
=450. Размер ![]() ; входное звено вращается с угловой скоростью
; входное звено вращается с угловой скоростью ![]() .
.

Задача 20 (см. рисунок к задаче 19)
Для секансного
механизма определить скорость скольжения в поступательной паре (1-2) в
положении, определяемом углом ![]() =450. Размер
=450. Размер ![]() ; входное звено вращается с угловой скоростью
; входное звено вращается с угловой скоростью ![]() .
.
Задача 21
Для синусного механизма
определить аналитически скорость и ускорение точки B в положении,
определяемом углом ![]() =600. Размеры
=600. Размеры ![]() ,
, ![]() ; входное звено вращается с угловой скоростью
; входное звено вращается с угловой скоростью ![]() .
.

Задача 22
Для синусного механизма определить
аналитически скорость и ускорение в относительном движении ползуна 2 по звену 3
в положении, определяемом углом ![]() =600. Размер
=600. Размер ![]() ; входное звено вращается с угловой скоростью
; входное звено вращается с угловой скоростью ![]() .
.

Задача 23
Для тангенсного механизма найти аналитически скорость точки A в положении, определяемом углом ![]() =450. Размер
=450. Размер ![]() ; кулиса 1 вращается с угловой скоростью
; кулиса 1 вращается с угловой скоростью ![]() .
.

Задача 24 (см. рисунок к задаче 23)
Для тангенсного
механизма найти аналитически скорость скольжения в поступательной паре (1-2) в
положении, определяемом углом ![]() =450. Размер h=0,20 м; кулиса 1
вращается с постоянной угловой скоростью
=450. Размер h=0,20 м; кулиса 1
вращается с постоянной угловой скоростью ![]() .
.
Задача 25
Рычаг длиной OA=0.5 м
вращается ускоренно; скорость его конца ![]() = 2 м/с, вектор
ускорения
= 2 м/с, вектор
ускорения ![]() направлен под углом
направлен под углом ![]() к вектору скорости.
Определить угловое ускорение e рычага.
к вектору скорости.
Определить угловое ускорение e рычага.

Задача 26 (см. рисунок к задаче 25)
Рычаг длиной OA=0.5 м
вращается ускоренно; скорость его конца ![]() = 2 м/с, вектор
ускорения
= 2 м/с, вектор
ускорения ![]() направлен под углом
направлен под углом ![]() к вектору скорости.
Определить величину ускорения
к вектору скорости.
Определить величину ускорения ![]() .
.
email: KarimovI@rambler.ru
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Теоретическая механика Сопротивление материалов
Прикладная механика Детали машин Строительная механика