Главная
Лекция 14. Волновые передачи.
Назначение и области применения.
Волновые передачи основаны на принципе передачи
вращательного движения за счет бегущей волновой деформации одного из зубчатых
колес.
Такая передача была запатентована американским инженером Массером в 1959 г.
Волновые передачи имеют меньшие массу и габариты, большую кинематическую точность, меньший мёртвый ход, высокую вибропрочность за счёт демпфирования (рассеяния энергии) колебаний, создают меньший шум.
При необходимости такие передачи позволяют передавать движение в герметичное пространство без применения уплотняющих сальников, что особенно ценно для авиационной, космической и подводной техники, а также для машин химической промышленности.
Кинематически эти передачи представляют собой разновидность планетарной
передачи с одним гибким зубчатым колесом. На рис. 14.1 изображены основные
элементы волновой передачи: неподвижное колесо 7 с внутренними зубьями,
вращающееся упругое колесо 2 с наружными зубьями и водило h. Неподвижное колесо
закрепляется в корпусе и выполняется в виде обычного зубчатого колеса с
внутренним зацеплением. Гибкое зубчатое колесо имеет форму стакана с легко
деформирующейся тонкой стенкой: в утолщенной части (левой) нарезаются зубья,
правая часть имеет форму вала. Водило состоит из
овального кулачка и специального подшипника.
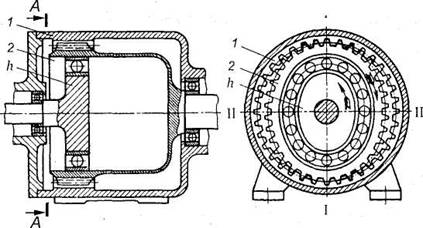
Рис. 14.1. Волновая передача
Гибкое колесо деформируется так, что по оси овала I—I зубья зацепляются на полную рабочую высоту; по оси II—II зубья не зацепляются.
Передача движения осуществляется за счет деформирования зубчатого венца гибкого колеса. При вращении водила волна деформации бежит по окружности гибкого зубчатого венца; при этом венец обкатывается по неподвижному жесткому колесу в обратном направлении, вращая стакан и вал. Поэтому передача и называется волновой, а водило — волновым генератором.
Существует большое количество конструкций волновых механизмов. Обычно эти механизмы преобразуют входное вращательное движение в выходное вращательное или поступательное. Волновые механизмы можно рассматривать как одну из разновидностей многопоточных планетарных механизмов, так как они обладают многозонным, а в случае зубчатого механизма, и многопарным контактом выходного звена с гибким колесом. Многозонный контакт обеспечивается за счет формы генератора волн (кулачок чаще с двумя, редко с тремя выступами), многопарный - за счет податливости зубчатого венца гибкого колеса. Такое сочетание позволяет волновым механизмам передавать значительные нагрузки при малых габаритах. Податливость зубчатого венца обеспечивает достаточно равномерное распределение нагрузки по зубьям, находящимся в зоне зацепления. При номинальных нагрузках процент зубьев находящихся в зацеплении составляет 15-25% от общего их числа. Поэтому в волновых передачах применяется мелкомодульное зацепление, а числа зубьев колес лежат в пределах от 100 до 600. Зона зацепления в волновой зубчатой передаче совпадает с вершиной волны деформации. По числу зон или волн передачи делятся на одноволновые, двухволновые и так далее. При вращении водила овальной формы образуются две волны. Такую передачу называют двухволновой. Бывают трехволновые передачи, на рис. 14.2 показана схема такой передачи. Передачи с числом волн более трех применяются редко.
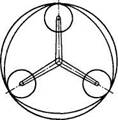
Рис. 14.2. Трехволновая передача
Распределение передаваемых усилий по нескольким зонам уменьшает нагрузку на элементы пар и позволяет существенно уменьшать габаритные размеры и массу механизмов. Многозонный и многопарный контакт звеньев существенно увеличивает жесткость механизма, а за счет осреднения ошибок и зазоров, уменьшает мертвый ход и кинематическую погрешность механизма. Поэтому волновые механизмы обладают высокой кинематической точностью и, несмотря на наличие гибкого элемента, достаточно высокой жесткостью. Образующиеся в структуре волнового механизма внутренние контуры, увеличивают теоретическое число избыточных или пассивных связей в механизме. Однако гибкое колесо за счет податливости компенсирует ряд возникающих перекосов. Поэтому при изготовлении и сборке волновых механизмов число необходимых компенсационных развязок меньше чем в аналогичных механизмах с жесткими звеньями.
Гибкое колесо обеспечивает волновым передачам возможность передачи движения через герметичную стенку, которая разделяет две среды (например, космический аппарат и открытый космос). При этом гибкое колесо выполняется как элемент герметичной стенки, входной вал и генератор волн располагаются по одну сторону стенки (внутри космического аппарата), а выходное звено - по другую (в космическом пространстве). Схема герметичной волновой передачи приведена на рис. 14.3.
Рис. 14.3
Преимущества и недостатки
волновых передач.
Преимущества:
- Возможность реализации в одной ступени при двухволновом генераторе волн больших передаточных отношений в диапазоне от 40 до 300.
- Высокая нагрузочная способность при относительно малых габаритах и массе.
- Малый мертвый ход и высокая кинематическая точность.
- Возможность передачи движения через герметичную перегородку.
- Малый приведенный к входному валу момент инерции (для механизмов с дисковыми генераторами волн).
Недостатки:
- Практически индивидуальное, дорогостоящее, весьма
трудоемкое изготовление гибкого колеса и
волнового генератора;
-
Возможность использования этих передач только при сравнительно невысокой
угловой скорости вала генератора;
-
Ограниченные обороты ведущего вала (во избежание больших центробежных сил
инерции некруглого генератора волн; мелкие модули зубьев 1,5-2 мм)
Передаточное отношение волновых передач определяется методом остановки водила (метод Виллиса).
По рис. 14.1 передаточное отношение: при неподвижном жестком колесе
![]() (1)
(1)
где
![]() и
и ![]() — угловые скорости волнового генератора и
гибкого колеса;
— угловые скорости волнового генератора и
гибкого колеса; ![]() ,
, ![]() — числа зубьев жесткого и гибкого колес; С — число волн;
— числа зубьев жесткого и гибкого колес; С — число волн;
при неподвижном упругом колесе
![]() (2)
(2)
В формуле (1) знак «минус» указывает на разные направления вращения генератора и гибкого колеса.
Причины выхода из строя и критерии
работоспособности.
В
процессе работы этой передачи наблюдается
- разрушение подшипника генератора волн от нагрузки в зацеплении;
- проскакивание генератора волн при больших вращающих моментах, когда зубья на входе в зацепление упираются друг в друга вершинами;
- поломка гибкого колеса от трещин усталости (особенно при u < 80);
- износ зубьев на концах;
- пластические деформации боковых поверхностей зубьев при перегрузках.
Расчёт волновых зубчатых передач отличается от расчёта обычных зубчатых передач тем, что учитывается деформация гибкого венца и генератора.
За критерий работоспособности обычно принимают допускаемые напряжения смятия
![]() ;
;
![]() ,
,
где ![]() – коэффициент ширины гибкого венца; d – делительный
диаметр гибкого венца.
– коэффициент ширины гибкого венца; d – делительный
диаметр гибкого венца.
Волновые
передачи можно применять в качестве редукторов, дифференциалов и вариаторов
скорости.
Структура волновой зубчатой передачи.
Рассмотрим одноволновую зубчатую передачу с генератором волн, который образует с гибким колесом пару скольжения. Волновая передача не может рассматриваться в рамках ранее принятых нами допущений, так как в ней содержится гибкое звено. Поэтому необходимо определить место гибкого элемента в структуре механизма. Гибкая связь обычно допускает по действием силовых воздействий определенные относительные перемещения соединяемых звеньев. Поэтому ее отнесем к отношениям между элементами или к упругой кинематической паре. Зубчатое колесо представляет собой замкнутую систему зубьев. В каждый рассматриваемый момент в контакте в высшей паре могут находится один или несколько зубьев. Так как зубчатые колеса - звенья, то зубья - элементы высшей кинематической пары. Поэтому многопарный контакт между зубчатыми колесами является контактом между элементами одной кинематической пары. Пассивные или избыточные связи, возникающие в этом контакте, относятся к внутренним связям кинематической пары и в структурном анализе на уровне звеньев не учитываются. Поэтому считаем, что в зацеплении находится один зуб. Структурная схема механизма с остановленным жестким колесом при гибком соединении зуба с валом гибкого колеса может быть представлена следующем образом.
Рис. 14.4. Волновая зубчатая передача с упругой муфтой
- стаканом.
Рис. 14.5. Волновая зубчатая передача с волновой
зубчатой муфтой.
Рассмотрим звенья и кинематические пары механизмов:
- звенья:
0 - корпус с закрепленным на нем жестким колесом.
1 - быстроходный вал с генератором волн.
2 - зуб гибкого колеса.
3 - вал гибкого колеса.
- кинематические пары:
![]() и
и ![]() - одноподвижные
вращательные пары.
- одноподвижные
вращательные пары.
![]() - двухподвижная
низшая пара (рис.14.6).
Эта пара образована зубом гибкого колеса и кулачком генератора волн. Пара
допускает два независимых движения зуба относительно кулачка: по касательной к
профилю кулачка (по оси х)
и в осевом направлении (по оси у).
Вращение зуба вокруг оси у и перемещения его по оси z не являются независимыми и определяются формой профиля кулачка.
- двухподвижная
низшая пара (рис.14.6).
Эта пара образована зубом гибкого колеса и кулачком генератора волн. Пара
допускает два независимых движения зуба относительно кулачка: по касательной к
профилю кулачка (по оси х)
и в осевом направлении (по оси у).
Вращение зуба вокруг оси у и перемещения его по оси z не являются независимыми и определяются формой профиля кулачка.
Рис. 14.6
![]() - двухподвижный упругий
шарнир (рис.14.7). Данная кинематическая пара должна обеспечивать зубу гибкого
колеса 2 возможность выполнять движения деформации относительно вала 3, но
относительные движения в тангенциальном направлении (по оси х) запрещены. Аналогичные движения
обеспечивает пара
- двухподвижный упругий
шарнир (рис.14.7). Данная кинематическая пара должна обеспечивать зубу гибкого
колеса 2 возможность выполнять движения деформации относительно вала 3, но
относительные движения в тангенциальном направлении (по оси х) запрещены. Аналогичные движения
обеспечивает пара ![]() в зубчатом соединении
в волновой зубчатой муфте и пара
в зубчатом соединении
в волновой зубчатой муфте и пара ![]() в волновом
зубчатом зацеплении (рис.14.7).
в волновом
зубчатом зацеплении (рис.14.7).
Оси координат в зубчатой паре направляются так:
ось z - по касательной к профилям в точке контакта,
ось х - по нормали к профилям,
ось у - по линии контакта зубьев.
Рис. 14.7
Подвижность механизма подсчитывается следующим образом:
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
![]() .
.
В механизме имеется
одна местная подвижность ![]() - подвижность зуба гибкого колеса в осевом
направлении (по оси у).
- подвижность зуба гибкого колеса в осевом
направлении (по оси у).
Заданная или основная подвижность механизма ![]() .
.
Число
избыточных связей в механизме равно: ![]()
Эти избыточные или пассивные связи определяют требование параллельности осей пар В,С,D и Е оси пары А.
Движение всех звеньев волнового механизма осуществляется в параллельных плоскостях. Поэтому механизм волновой зубчатой передачи можно рассматривать как плоский.
В этом случае:
![]() ,
, ![]() ,
, ![]() .
.
![]() .
.
![]() ,
, ![]()
![]()
Классификация типовых структурных схем ВЗП
В таблице 1 приведены наиболее распространенные структурные схемы типовых волновых зубчатых передач, а также диапазоны рекомендуемых передаточных отношений и ориентировочные значения КПД при этих передаточных отношениях. Основное отличие одной схемы от другой заключается в конструкции муфты соединяющей гибкий зубчатый венец с корпусом или с выходным тихоходным валом. В таблице показаны только три наиболее распространенных разновидности: гибкая оболочка в форме стакана, гибкая труба с шлицевым соединением и волновая зубчатая муфта. Если в передаче с гибким колесом - кольцом (в третьей из рассматриваемых схем), второе волновое зацепление выполнить как волновую зубчатую передачу, то получим двухступенчатую ВЗП.
Таблица 1
|
№ |
Структурная схема ВЗП |
|
h |
|
1 |
|
50...300
|
0,95 ...0,8 |
|
2 |
|
50...300
|
0,9...0,8 |
|
3 |
|
2000...105
|
0,2..0,01 |
|
40...300 Если |
0,85..0,7 |
Кинематика волнового механизма
Рассмотрим идеальную фрикционную волновую передачу. В этой передаче контактирующие поверхности гибкого и жесткого колес будут соответствовать начальным поверхностям зубчатых колес. Толщину гибкого колеса принимаем бесконечно малой. Тогда срединная поверхность гибкого колеса совпадает с его начальной поверхностью. Считаем, что срединная поверхность гибкого колеса нерастяжима, то есть длина ее до и после деформирования колеса генератором волн остается неизменной.
Рис. 14.8
На рис.14.8 приняты следующие обозначения:
![]() - радиус
начальной окружности условного колеса;
- радиус
начальной окружности условного колеса;
![]() - радиус начальной
окружности жесткого колеса;
- радиус начальной
окружности жесткого колеса;
![]() - радиус
деформирующего диска;
- радиус
деформирующего диска;
![]() - радиус срединной
окружности гибкого колеса;
- радиус срединной
окружности гибкого колеса;
![]() - радиус срединной
окружности условного колеса;
- радиус срединной
окружности условного колеса;
![]() - радиальная
деформация гибкого колеса.
- радиальная
деформация гибкого колеса.
Рассмотрим
движение звеньев дифференциального волнового механизма относительно генератора
волн.
Тогда угловые скорости звеньев изменятся следующим образом:
Таблица 2
|
Движение механизма |
Звено г |
Звено ж |
Звено h |
Звено 0 |
|
относительно стойки |
|
|
|
|
|
относительно генератора волн |
|
|
|
|
В движении
звеньев относительно генератора волн скорости звеньев равны угловым скоростям в
движении относительно стойки минус угловая скорость генератора. Скорость точки
жесткого колеса, совпадающей с полюсом зацепления ![]() , а
скорость точки, совпадающей с полюсом на гибком колесе
, а
скорость точки, совпадающей с полюсом на гибком колесе ![]() .
.
В полюсе
зацепления нет скольжения и ![]() , а так как срединную поверхность оболочки считаем
нерастяжимой то
, а так как срединную поверхность оболочки считаем
нерастяжимой то ![]() . Тогда для движения относительно генератора волн
. Тогда для движения относительно генератора волн
![]() ;
; ![]()
![]()
![]()
![]()
Для волнового зубчатого редуктора:
- при заторможенном
жестком колесе ![]()
![]()
- при
заторможенном гибком колесе ![]()
![]()
Расчет геометрии
волнового зубчатого зацепления (ВЗП).
В расчете
геометрии волнового зацепления существует два основных подхода. В первом методе
исследуется относительное движение зубьев и, на основе этого, разрабатываются
рекомендации по выбору геометрических параметров зацепления. Второй метод
основан на использовании расчетного внутреннего зацепления жесткого колеса с
условным расчетным колесом. Это колесо вписывается в деформированное гибкое
колесо на участке возможного зацепления. Преимуществом первого метода можно
считать относительную универсальность, которая позволяет в расчете геометрии
учитывать деформации как гибкого, так и жесткого колеса под нагрузкой. Однако
разработать рекомендации даже для небольшого количества конструкций ВЗП затруднительно.
Второй метод позволяет использовать для расчета геометрии стандартный расчет внутреннего эвольвентного
зацепления для пары колес ![]() и
и ![]() .
.
Число зубьев условного колеса рассчитывается по следующей формуле:
![]()
где:
![]() - относительная деформация
гибкого колеса,
- относительная деформация
гибкого колеса,
![]() -
коэффициент, определяемый углом
-
коэффициент, определяемый углом ![]() ,
,
![]() -
угловая координата участка постоянной кривизны деформированной кривой гибкого
колеса.
-
угловая координата участка постоянной кривизны деформированной кривой гибкого
колеса.
После
определения ![]() определяются:
определяются:
- толщина гибкого
колеса под зубчатым венцом ![]()
![]()
- коэффициент смещения гибкого колеса
![]()
- относительная деформация
![]() ,
,
где при
внутреннем деформировании: знак ( + ) , ![]() ,
, ![]() ,
,
а при внешнем
деформировании: знак ( - ) , ![]() ,
, ![]()
- радиус срединной окружности условного колеса
![]()
- радиус срединной окружности гибкого колеса
![]()
- межосевое расстояние
![]()
- угол зацепления
![]()
Далее расчет ведется по стандартному алгоритму расчета внутреннего эвольвентного зацепления.
Вопросы для самопроверки
- Дайте определение волновой зубчатой передачи.
- Является ли ВЗП разновидностью планетарных механизмов или это особый вид передач?
- Расскажите о достоинствах и недостатках ВЗП.
- Каковы особенности конструкции ВЗП для преобразования движения через герметичную стенку?
- Как определяется передаточное отношение ВЗП с подвижным гибким и жестким колесами?
email: KarimovI@rambler.ru
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Теоретическая механика Сопротивление материалов
Прикладная механика Детали машин Строительная механика