Главная
Лекция 6.
Уравновешивание и балансировка вращающихся масс.
Цели уравновешивания и
балансировки
При движении звеньев с переменными скоростями (с ускорением) возникают силы инерции и их моменты, которые принято называть динамическими нагрузками. Их возникновение приводит к вибрации и шуму. Причинами возникновения вибраций могут быть периодические изменения сил (силовое возмущение), перемешений (кинематическое возмущение) или инерционных характеристик (параметрическое возмущение). Вибрацией (от лат. vibratio - колебание) называют механические колебания в машинах или механизмах. Колебание - движение или изменение состояния, обладающие той или иной степенью повторяемости или периодичностью. Если источник возникновения вибраций определяется внутренними свойствами машины или механизма, то говорят о его виброактивности. Чтобы вибрации механизма не распространялись на окружающие его системы или чтобы защитить механизм от вибраций, воздействующих на него со стороны внешних систем, применяются различные методы виброзащиты. Различают внешнюю и внутреннюю виброактивность. Под внутренней виброактивностью понимают колебания возникающие внутри механизма или машины, которые происходят по его подвижностям или обобщенным координатам. Эти колебания не оказыват непосредственного влияния на окрущающую среду. При внешней виброактивности изменение положения механизма приводит к изменению реакций в опорах (т.е. связях механизма с окружающей средой) и непосредственному вибрационному воздействию на связанные с ним системы. Одна и основных причин внешней виброактивности - неуравновешенность его звеньев и механизма в целом, которое устраняется уравновешиванием звеньев при проектировании механизма. Это достигается соответствующим подбором масс и моментов инерции.
Неуравновешенным будем называть такой механизм (или его звено), в котором при движении центр масс механизма (или звена) движется с ускорением. Так как ускоренное движение системы возникает только в случае, если равнодействующая внешних силовых воздействий не равна нулю. Согласно принципу Д’Аламбера, для уравновешивания внешних сил к системе добавляются расчетные силы - силы и моменты сил инерции. Поэтому уравновешенным будем считать механизм, в котором главные вектора и моменты сил инерции равны нулю, а неуравновешенным механизм, в котором эти силы неравны нулю.
Для устранения
малой неуравновешенности, возникающей после изготовления звеньев и их монтажа
из-за несоблюдения размеров в процессе изготовления, неточности сборки,
неоднородности материала, звенья балансируют.
Условия
уравновешенности ротора
Деталь, вращающаяся в опорах, называется ротором. В связи с появлением быстроходных машин возникла проблема уравновешивания быстровращающихся деталей. Так, например, скорость некоторых турбин, валов гироскопов, суперцентрифуг достигает 3-50 тысяч об/мин и малейшее смещение центра масс с геометрической оси вращения вызывает появление больших сил инерции, т.е. вибрационных явлений в машине и фундаменте.
При вращении какой-либо i-й массы m на нее действует сила
инерции, которую можно разложить на нормальную ![]() и тангенциальную
и тангенциальную ![]() составляющие (рис. 6.1).
составляющие (рис. 6.1).
Величины этих сил можно вычислить по формулам
 (1)
(1)
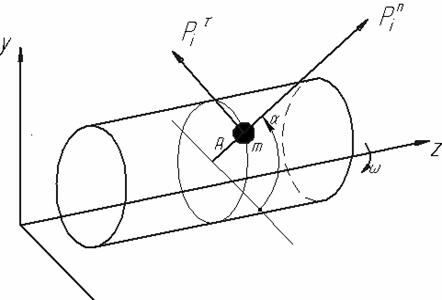
Рис. 6.1. Схема ротора
Спроектируем эти силы на оси х, у, z и определим моменты этих сил относительно осей:
 (2)
(2)
Подставив (1)
в (2) и просуммировав, получим (учитывая, что ![]() ,
,![]() )
)
 (3)
(3)
Последнее
уравнение в (3) можно исключить, так как момент ![]() не создает
дополнительной реакции в опорах ротора.
не создает
дополнительной реакции в опорах ротора.
Силы ![]() и
и ![]() , моменты
, моменты ![]() и
и ![]() равны нулю в том
случае, если координаты x и y массы m расположены на оси вращения z (т.е.
центр масс ротора неподвижен):
равны нулю в том
случае, если координаты x и y массы m расположены на оси вращения z (т.е.
центр масс ротора неподвижен):
 (4)
(4)
Это есть условие статической уравновешенности ротора.
Моменты ![]() и
и ![]() равны нулю, если центробежные моменты инерции ротора равны
нулю:
равны нулю, если центробежные моменты инерции ротора равны
нулю:
 (5)
(5)
Это есть условие
динамической уравновешенности ротора.
Такое уравновешивание применяется для плоских деталей, длина которых мала по сравнению с диаметром.
Выводы: ротор статически уравновешен, если его центр тяжести расположен на оси вращения; ротор динамически уравновешен, если его ось вращения является главной центральной осью инерции.
Уравновешенность
ротора можно охарактеризовать и силовыми параметрами. Он статически
уравновешен, если главный вектор сил индукции ![]() . Ротор динамически уравновешен, если главный вектор
моментов сил инерции
. Ротор динамически уравновешен, если главный вектор
моментов сил инерции ![]() .
.
При проектировании
роторов используют условия (4) и (5). При проверке уравновешенности
изготовленных роторов используют условия ![]() и
и ![]() . Устранение остаточной неуравновешенности уже
изготовленного ротора, возникшей по причинам неточности изготовления, монтажа,
из-за неоднородности материала, из которого изготовлен ротор, называется балансировкой.
Балансировка вращающихся масс осуществляется на специальных балансировочных
станках, при этом исключается неуравновешенность, вызванная неточностью
изготовления детали. Техника статической и динамической балансировки жестких
роторов входит в содержание лабораторного практикума по дисциплине «Теория
механизмов и машин».
. Устранение остаточной неуравновешенности уже
изготовленного ротора, возникшей по причинам неточности изготовления, монтажа,
из-за неоднородности материала, из которого изготовлен ротор, называется балансировкой.
Балансировка вращающихся масс осуществляется на специальных балансировочных
станках, при этом исключается неуравновешенность, вызванная неточностью
изготовления детали. Техника статической и динамической балансировки жестких
роторов входит в содержание лабораторного практикума по дисциплине «Теория
механизмов и машин».
Уравновешивание
вращающихся масс
Уравновешивание масс, находящихся в
одной плоскости
Положения
отдельных неуравновешенных масс ![]() , расположенных на роторе, можно охарактеризовать величинами
радиус-векторов
, расположенных на роторе, можно охарактеризовать величинами
радиус-векторов ![]() относительно оси его
вращения. Система вращающихся масс будет уравновешена, если главный вектор сил
инерции, действующих на эти массы при их совместном вращении, равен нулю:
относительно оси его
вращения. Система вращающихся масс будет уравновешена, если главный вектор сил
инерции, действующих на эти массы при их совместном вращении, равен нулю:
![]()
где ![]() – сила инерции,
действующая на i-ю массу;
– сила инерции,
действующая на i-ю массу; ![]() – сила инерции
уравновешивающей массы
– сила инерции
уравновешивающей массы ![]() , расположенной на расстоянии
, расположенной на расстоянии ![]() от оси вращения
ротора.
от оси вращения
ротора.
Сила инерции,
действующая на i-ю массу, вращающуюся с постоянной скоростью ![]() , равна
, равна ![]() .
.
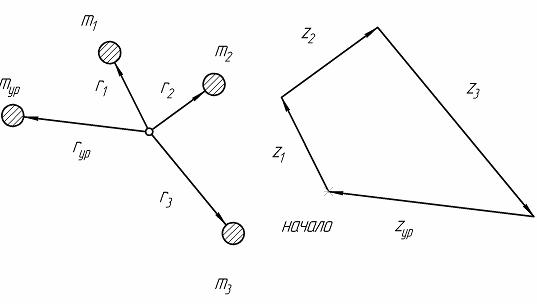
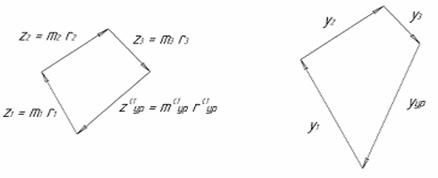
Рассмотрим систему, состоящую из трех неуравновешенных вращающихся масс m1, m2 и m3 (рис. 6.2).
а)
б)
Рис. 6.2. Система неуравновешенных масс (а) и план сил инерции (б)
Условием уравновешенности данной системы масс является уравнение
![]() .
.
Так как ![]() , то это уравнение можно записать в виде
, то это уравнение можно записать в виде
![]()
Так как ![]() (мы рассматриваем вращающуюся
систему масс), то
(мы рассматриваем вращающуюся
систему масс), то
![]() . (6)
. (6)
Уравнение (6) можно решить аналитическим и графическим методами.
При аналитическом методе решения составляются уравнения проекций сил на координатные оси, из которых находят являющееся неизвестным последнее слагаемое.
Найдем ![]() и
и ![]() графическим методом,
то есть построением векторного многоугольника (см. рис. 6.2, б), являющегося графической
интерпретацией векторного уравнения (6). Предварительно выбираем масштаб сил
графическим методом,
то есть построением векторного многоугольника (см. рис. 6.2, б), являющегося графической
интерпретацией векторного уравнения (6). Предварительно выбираем масштаб сил
![]() ,
,
где z1 – длина вектора,
изображающего силу ![]() , (мм).
, (мм).
Размерность
масштаба ![]() (если масса задана в кг, радиус – в м).
(если масса задана в кг, радиус – в м).
Переведем
масштабом ![]() другие известные
слагаемые уравнения (6) в векторные отрезки:
другие известные
слагаемые уравнения (6) в векторные отрезки:
![]()
Тогда векторное
уравнение (6) запишется в виде
![]() .
.
Построив
векторный силовой многоугольник (см. рис. 6.2, б) в масштабе ![]() , из него определим длину вектора
, из него определим длину вектора ![]() . Выбрав из конструктивных соображений величину
. Выбрав из конструктивных соображений величину ![]() , вычисляем уравновешивающую массу
, вычисляем уравновешивающую массу
 .
.
Поместив ее на
роторе в направлении вектора ![]() на расстоянии от оси
вращения, равном длине этого вектора, уравновесим ротор.
на расстоянии от оси
вращения, равном длине этого вектора, уравновесим ротор.
На практике наиболее часто статическое уравновешивание проводят:
- выбирая симметричные схемы механизма;
- устанавливая на звеньях механизма противовесы (или корректирующие массы);
- размещая
противовесы на дополнительных звеньях или кинематических цепях.
Уравновешивание вращающихся масс,
расположенных произвольно
Последовательность
уравновешивания масс, расположенных произвольно, рассмотрим на примере ротора с
системой четырех неуравновешенных масс (рис. 6.3). Пусть известны величины
неуравновешенных масс ![]() и их положения
относительно оси вращения ротора, обусловленные радиусами – векторами
и их положения
относительно оси вращения ротора, обусловленные радиусами – векторами ![]() и расстояниями
и расстояниями ![]() относительно одной из
произвольно выбранных плоскостей I, перпендикулярной оси вращения рассматриваемого ротора.
относительно одной из
произвольно выбранных плоскостей I, перпендикулярной оси вращения рассматриваемого ротора.
При вращении ротора и неуравновешенных масс с постоянной угловой скоростью на каждую из масс действует сила инерции
![]() .
.
Так как
угловая скорость в рассматриваемом здесь частном случае является величиной
постоянной, то угловое ускорение отсутствует (![]() = 0) и тангенциальная составляющая силы инерции равна нулю.
= 0) и тангенциальная составляющая силы инерции равна нулю.
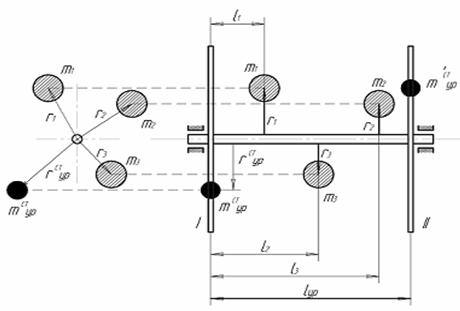
а)
б)
в) г)
Рис. 6.3. Уравновешивание масс, расположенных произвольно:
а – вид на ротор с торца; б – вид на ротор с боку;
в – план сил при статическом уравновешивании;
г – план моментов сил при динамическом уравновешивании
Выбираем плоскости приведения I и II (см. рис. 6.3), в которых будем располагать уравновешивающие массы.
Задача заключается в том, что необходимо уравновесить массы динамически.
Сначала проводим статическое уравновешивание в плоскости I. Его последовательность описана в предыдущей главе.
![]() ,
, ![]() ,
,
![]() . (7)
. (7)
Используя (7),
построим векторный многоугольник и графически найдем ![]() .
.
Уравновесим
действие инерционных моментов, т.е. выполним условие ![]() . Для этого запишем уравнения
. Для этого запишем уравнения
![]() ,
, ![]() . (8)
. (8)
Так как ![]() , то из уравнения (8) следует, что
, то из уравнения (8) следует, что
![]() . (9)
. (9)
Решая
графически векторное уравнение (9), находим ![]() .
.
Предварительно
выбираем масштаб
![]() .
.
Тогда
уравнение (9) запишется в виде
![]() .
.
При этом
принимаем, что векторы моментов ![]() повернуты на 900
и совпадают с направлением
повернуты на 900
и совпадают с направлением ![]() .
.
![]() . (10)
. (10)
Находим из (10)
величину ![]() , задавшись
, задавшись ![]() , или наоборот. Здесь
, или наоборот. Здесь ![]() равна расстоянию между плоскостями приведения I и II.
равна расстоянию между плоскостями приведения I и II.
Проводя от оси
вращения ротора линию, параллельную ![]() , откладываем на ней с противоположных сторон
, откладываем на ней с противоположных сторон ![]() и на концах
этих векторов устанавливаем две уравновешивающие массы
и на концах
этих векторов устанавливаем две уравновешивающие массы ![]() . Причем одна из них будет расположена в плоскости I, другая – в плоскости II. Массы
. Причем одна из них будет расположена в плоскости I, другая – в плоскости II. Массы ![]() и
и ![]() в плоскости I можно объединить в одну массу.
в плоскости I можно объединить в одну массу.
Балансировка
вращающихся масс (роторов)
Уравновешивание роторов или систем масс используется при проектировании механизмов.
В уже изготовленных роторах встречаются, как было сказано выше, неоднородности материала, возникают неточности изготовления и сборки, в результате чего возникает остаточная неуравновешенность, которую нужно устранять балансировкой.
Различают балансировку:
– статическую, которую производят для достаточно плоских роторов типа дисков, колес, маховиков, шкивов. Ротор при этом устанавливают в опорах с малым трением (например, на призмах) и путем добавления масс или высверливания добиваются безразличного положения балансируемого ротора на опорах;
– динамическую, которую выполняют для роторов, имеющих значительную длину (валы, широкие колеса, шкивы и т.д.), на специальных станках.
Задача
балансировки ротора заключается в определении, в выбранных плоскостях
коррекции, значений и углов дисбалансов и размещении в этих плоскостях
корректирующих масс, дисбалансы которых равны по величине и противоположны по
направлению найденным дисбалансам ротора. На практике балансировку проводят:
при конструировании - расчетными методами, в процессе изготовления деталей и
узлов - экспериментально на специальных балансировочных станках. Балансировка
на станках является более точным и надежным методом, по сравнению с расчетными. Поэтому она применяется для ответственных
деталей с высокими рабочими частотами вращения. Корректировка масс ротора осуществляется
либо присоединением к нему дополнительных корректирующих масс (наплавлением,
наваркой или привинчиванием противовесов), либо удалением части массы ротора с
“тяжелой” стороны (фрезерованием или высверливанием). Точность балансировки
характеризуется величиной остаточного дисбаланса ![]() ротора в каждой из плоскостей коррекции.
Величина
ротора в каждой из плоскостей коррекции.
Величина ![]() не
должна превышать допустимых для данного класса точности значений,
регламентируемых ГОСТ 22061-76.
не
должна превышать допустимых для данного класса точности значений,
регламентируемых ГОСТ 22061-76.
Балансировка эквивалентна уравновешиванию системы инерционных сил, прикладываемых к подвижному ротору для его равновесия. Эту систему, как и любую произвольную систему сил, можно заменить равнодействующими - главным вектором и главным моментом или двумя векторами, расположенными в произвольных параллельных плоскостях. Для уравновешивания системы сил достаточно уравновесить эти равнодействующие. При балансировке операции над силами заменяют действиями над дисбалансами. Поэтому для жестких роторов вышесказанное можно сформулировать так: жесткий ротор можно уравновесить двумя корректирующими массами, расположенными в двух произвольно выбранных плоскостях, перпендикулярных оси его вращения. Эти плоскости называют плоскостями коррекции.
Уравновешивание
механизмов
Целью
уравновешивания механизмов является устранение переменных во времени и
пространстве воздействий стойки, станины механизма на опору, фундамент,
вызывающих колебания фундамента и здания, а также уменьшение вибрации.
Условия
уравновешенности механизма
Условия уравновешенности механизмов в общем виде можно охарактеризовать уравнениями
![]() ,
,
![]() ,
,
где ![]() и
и ![]() – главный вектор сил и главный момент сил давления станины механизма на
фундамент, опору;
– главный вектор сил и главный момент сил давления станины механизма на
фундамент, опору; ![]() и
и ![]() – главный вектор сил и
главный момент всех других сил, внешних по отношению к механизму;
– главный вектор сил и
главный момент всех других сил, внешних по отношению к механизму; ![]() и
и ![]() – главный вектор сил
инерции и главный момент сил инерции звеньев механизма.
– главный вектор сил
инерции и главный момент сил инерции звеньев механизма.
С достаточной
для практики точностью часто ограничиваются условиями
![]() , (11)
, (11)
![]() .
.
Этого можно
достичь установкой противовесов на подвижных звеньях, рациональным размещением
центров масс звеньев механизма при его проектировании.
Статическое
уравновешивание плоского механизма с помощью противовесов
Часто
ограничиваются лишь статическим уравновешиванием механизма и его звеньев, т.е.
выполнением условия (11) ![]() . Это условие соответствует постоянству положения центров
масс звеньев относительно стойки (т.е. центр их масс должен быть неподвижен).
Так как
. Это условие соответствует постоянству положения центров
масс звеньев относительно стойки (т.е. центр их масс должен быть неподвижен).
Так как ![]() ,
, ![]() , то необходимо обеспечить условие
, то необходимо обеспечить условие ![]() , т.е. ускорение центра тяжести должно отсутствовать.
, т.е. ускорение центра тяжести должно отсутствовать.
Рассмотрим последовательность статического уравновешивания на примере четырёхшарнирного механизма (рис. 6.4, а). Заменяем массы звеньев 1, 2, 3 сосредоточенными массами в точках A, B, C, D, причём в силу неподвижности точек A и D, массы, сосредоточенные в этих точках, можно не учитывать.
Рис. 6.4
Приведённые массы в точках В и С равны:
![]() ;
;
![]() .
.
Так как
заменяющие массы ![]() и
и ![]() совершают вращательное
движение, то для уравновешивания сил инерции необходимы противовесы с массами
совершают вращательное
движение, то для уравновешивания сил инерции необходимы противовесы с массами ![]() и
и ![]() , определяемыми из условий (рис. 6.4, б):
, определяемыми из условий (рис. 6.4, б):
![]() ;
; ![]() ,
,
где, задавая длины противовесов, можно получить их массы и наоборот.
Рассмотрим
моментное уравновешивание на примере четырёхшарнирного
механизма. Его приближённое моментное уравновешивание можно осуществить после
статического уравновешивания, введя в схему механизма два одинаковых
дополнительных противовеса ![]() (рис. 6.5), соединённых
с зубчатыми колёсами “a” и “b”. Колесо “a” жёстко связано с кривошипом 1 и
вращается с угловой скоростью
(рис. 6.5), соединённых
с зубчатыми колёсами “a” и “b”. Колесо “a” жёстко связано с кривошипом 1 и
вращается с угловой скоростью ![]() , а равное ему колесо “b” вращается с той же
угловой скоростью
, а равное ему колесо “b” вращается с той же
угловой скоростью ![]() , но угловые координаты противовесов отличаются на 1800,
поэтому момент пары сил инерции от противовесов
, но угловые координаты противовесов отличаются на 1800,
поэтому момент пары сил инерции от противовесов ![]() равен
равен ![]() . Подбирая положение точки E, можно
обеспечить направление
. Подбирая положение точки E, можно
обеспечить направление ![]() , противоположное направлению
, противоположное направлению ![]() , а массу противовесов
, а массу противовесов ![]() определяют из условия
определяют из условия ![]() .
.
Рис.6.5
Уравновешивание роторов при проектировании
Статическое уравновешивание при проектировании
При проектировании статически уравновешивают
детали, имеющие небольшие осевые размеры и конструктивно неуравновешенные,
например, дисковые кулачки (рис. 6.6)
Когда кулачок неподвижен ![]() , реакция в опоре
, реакция в опоре ![]() . При вращении кулачка, реакция в опоре равна векторной сумме сил тяжести
и центробежной силы инерции
. При вращении кулачка, реакция в опоре равна векторной сумме сил тяжести
и центробежной силы инерции
Рис.6.6
При проектировании детали типа кулачка уравновешиваются так: в
деталь с центром на оси вращения вписывается окружность, подсчитываются площади
ограниченные контуром кулачка и расположенные вне или внутри окружности,
определяется массы и центры масс ![]() неуравновешенных частей кулачка, находится
эксцентриситет
неуравновешенных частей кулачка, находится
эксцентриситет ![]() центра масс
центра масс ![]() кулачка по величине и направлению и
определяется его дисбаланс с помощью корректирующей массы
кулачка по величине и направлению и
определяется его дисбаланс с помощью корректирующей массы ![]() , размещаемой
на эксцентриситете
, размещаемой
на эксцентриситете ![]() , создается дисбаланс
, создается дисбаланс ![]() равный по величине
и противоположный по направлению
равный по величине
и противоположный по направлению ![]() .
.
Динамическое уравновешивание при проектировании
Динамическое уравновешивание при
проектировании проводят с деталями и узлами, в которых массы распределены
относительно оси вращения неравномерно, например, детали типа коленчатого вала.
Эти детали делят на несколько дисков и в каждом диске, также как при статическом уравновешивании, определяют
величину и направление дисбаланса ![]() .
.
Рис.6.7
На детали выбирают две плоскости коррекции и каждый вектор дисбаланса раскладывают на две
составляющие, расположенные в плоскостях коррекции. Затем составляющие векторы
дисбалансов в плоскостях коррекции суммируются и их равнодействующий дисбаланс,
например, ![]() , уравновешивается соответствующей корректирующей массой
, уравновешивается соответствующей корректирующей массой ![]() . Пример такого уравновешивания изображен на
рис. 6.7.
. Пример такого уравновешивания изображен на
рис. 6.7.
Вопросы для самопроверки
- Что в механических системах называется вибрациями?
- Какую виброактивность механизма или машины называют внешней, а какую - внутренней?
- Какая механическая система или звено считаются неуравновешенными?
- Какие звенья механизмов называются роторами?
- Что такое "неуравновешенность ротора"? Из-за чего она может возникнуть?
- Что называется статической неуравновешенностью?
- в каком случае неуравновешенность называется моментной?
- Что понимают под динамической балансировкой ротора?
- Перечислите виды неуравновешенности роторов?
- Как проводится статическое уравновешивание ротора при проектировании?
- Как проводится динамическое
уравновешивание ротора при проектировании?
- Что такое дисбаланс и чем он характеризуется?
- Чему равен главный вектор дисбалансов ротора?
- Чему равен главный момент дисбалансов ротора?
- Какая операция называется балансировкой ротора?
- Изложите основные положения метода замещающих масс?
- Что является задачей статической балансировки?
- Как проверить нуждается ли ротор в статической балансировке?
- Как осуществляется статическая балансировка?
- Какое минимальное количество плоскостей исправления необходимо для выполнения статической балансировки?
- Для каких целей можно ограничиться статической балансировкой?
- Какие вы знаете виды балансировки?
- Как осуществить полное статическое уравновешивание кривошипно-ползунного механизма?
- Как осуществить статическое уравновешивание вертикальной составляющей сил инерции в кривошипно-ползунном механизме?
- Что является задачей динамической балансировки?
- Как проверить нуждается ли ротор в динамической балансировке?
- Как осуществляется динамическая балансировка?
- Какое минимальное количество плоскостей исправления необходимо для выполнения динамической балансировки?
- Для каких деталей необходима динамическая балансировка?
email: KarimovI@rambler.ru
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Теоретическая механика Сопротивление материалов
Прикладная механика Детали машин Строительная механика