Главная
Лабораторная работа №36
Исследование устройства для
моделирования рабочего процесса землеройной машины
Цель работы: изучение структуры незамкнутой кинематической цепи
механизма со звеном переменной длины.
Объект исследования: модель землеройной машины.
В
предыдущей лабораторной работе описана модель механизма с выстоем
звеньев постоянной длины. Познакомимся с устройством аналогичного назначения,
но решающую задачу поворота ковша (схвата) другими
конструктивными методами — с помощью применения звеньев, меняющих свою длину в
процессе работы механизма.
Описание кинематической схемы устройства
Устройство
включает шарнирно связанные с рукоятью 6 (рис. 1)
стрелу 2 с упорами и ковш 7 с тягами 8. Механизм выполнен в виде кривошипа 1,
шатуна 11 с двумя упорами 12, размещенными в корпусе 15, шарнирно связанном с
рукоятью 6 и коромысла 9. Причем кривошип 1 связан со стрелой 2 посредством
закрепленного на ней кулисного камня 3, а шатун 11 связан одним концом с кривошипом
1, а другим – с рукоятью 6. На шатуне 11 закреплен дополнительный кулисный
камень 10. На стреле 2 закреплены упоры 4 и 5, ограничивающие поворот рукояти
6. К упорам 12 шатуна 11 упругим элементом 13 прижаты шайбы 14. Упоры 12
размещены в направляющих корпуса 15, который имеет упоры 16 для шайб 14 и
шарниром 17 соединены с рукоятью 6. Шатун 11 пропущен через корпус 15.
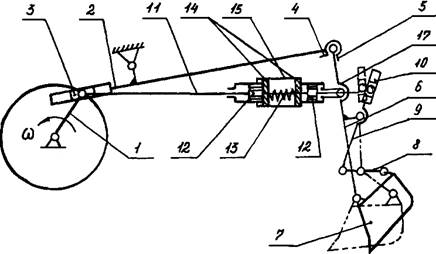
Рис. 1. Кинематическая схема механизма со звеном
переменной длины
Работа устройства
При
вращении кривошипа 1 и перемещении рукояти 6 между упорами 4 и 5 стрелы 2
кромка ковша 7 описывает траекторию без поворота ковша 7 относительно рукояти 6
(рис. 2), поскольку шатун 11 вместе с упорами 12 и шайбами 14 остается
неподвижным относительно корпуса 15. Как только рукоять 6 коснется упора 5, она
остановится относительно стрелы 2, вместе с ними останавливается и корпус 15.
Однако шатун 11 продолжает двигаться, например, вправо и своим левым упором 12
через шайбу 14 сжимает упругий элемент 13 и перемещает кулису 9, осуществляя
поворот ковша 7.
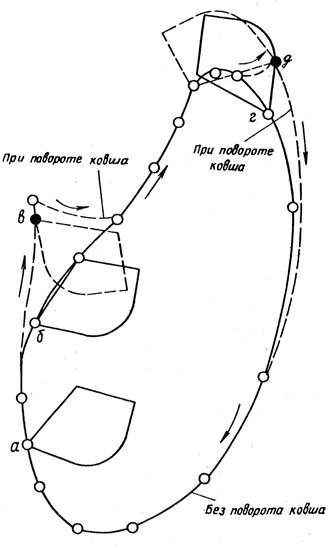
Рис. 2. Траектория конечного звена
В
результате в течение выстоя рукояти 6 происходят
повороты стрелы 2 и ковша 7. Поворот ковша 7 относительно рукояти 6
демонстрирует увеличение высоты разгрузки (угла опрокидывания) ковша 7. При
изменении направления движения шатуна 11 ковш 7 возвращается в исходное
положение, а рукоять 6 продолжает прижиматься к упору 5 упругим элементом 13
через шайбу 14, упор 16 корпуса 15 и шарнир 17. При контакте рукояти 6 с упором
4 стрелы 2 поворот ковша происходит аналогично, а прижатие к упору 4
осуществляет упругий элемент 13 через левую шайбу 14 упор 16 корпус 15 и шарнир
17.
Перемещая
упоры 4 и 5 относительно рукояти 6, можно регулировать фазы поворота ковша 7 на
траектории (рис. 1).
Порядок выполнения работы
1.
Внимательно изучить описание и схему устройства механизма (рис. 1).
2.
Определить количество подвижных звеньев механизма.
3.
Определить количество и классы кинематических пар, образующих устройство.
4.
Определить степень свободы структурной схемы.
5.
Найти рабочее пространство конечного звена механизма. Для этого построить 6...8
положений звеньев конечного звена механизма.
6.
Определить и назвать звенья, образующие механизм.
7.
Построить 3 положения механизма поворота ковша 7. Длины звеньев дает
преподаватель.
Форма отчета
Отчет
по лабораторной работе должен содержать:
1.
Кратко сформулированную цель работы. Определение кинематической цепи и, в
частности, открытой (незамкнутой).
2.
Структурную схему механизма в масштабе с использованием стандартных условных
обозначений с нанесенными на нее позициями звеньев.
3.
Расчет степени свободы механизма.
4.
Эскиз рабочего пространства механизма.
5.
Схему устройства элементов в корпусе 15.
6.
Выводы по работе.
Контрольные вопросы
1.
Что такое незамкнутая кинематическая цепь?
2.
Как определить степень свободы кинематической цепи любого вида?
3.
Как устроен механизм, расположенный в корпусе 15? Где его можно применить еще?
4.
Длина каких звеньев механизма сильнее всего влияет на
размеры рабочего пространства устройства?
email: KarimovI@rambler.ru
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Теоретическая механика Сопротивление материалов
Прикладная механика Детали машин Строительная механика