Главная
Лабораторная
работа №9
Определение
коэффициента полезного действия механизма
Цель работы
– изучить теоретические основы определения к.п.д. простых механизмов, научиться
определять к.п.д. винтовой пары экспериментально и аналитически, сопоставляя
полученные результаты.
Коэффициентом
полезного действия механизма называется отношение работы сил полезного
сопротивления (полезной работы) Апс к работе движущих сил Адв за цикл установившегося движения
![]()
Так как за цикл установившегося движения работа
движущих сил равна сумме работ всех сил сопротивлений, как полезных, так и
вредных Авс (к последним отнсятся силы трения в кинематических парах, силы
сопротивления окружающей среды), то
![]()
и
![]()
Отношение
работы сил вредного сопротивления к работе движущих сил называется коэффициентом
потерь:
![]()
Он связан с к.п.д. зависимостью:
![]()
К.п.д. определяется только для тягового режима работы машины, когда Апс<0 и Адв>0.
Для режима
оттормаживания (при нем Апс>0
и Адв>0) к.п.д. не
определяется.
Режим оттормаживания характерен для работы машин, в
которых используются самотормозящиеся механизмы.
Работа сил вредных сопротивлений Авс для данной машины
величина непостоянная и зависит от силы полезного сопротивления. Чем больше
величина этой силы, тем большую величину будут иметь реакции в кинематических
парах и тем больше будут силы трения.
К.п.д. машины также величина
непостоянная и зависит от силы полезного сопротивления. До определенной
величины силы полезного сопротивления к.п.д. машины растет, затем незначительно
снижается. При нулевом значении силы полезного сопротивления (Q=0), действующей на выходное звено, движущая сила или
момент сил, приложенный к входному звену не равен нулю. Это вызвано наличием
трения в кинематических парах механизма, сопротивлением окружающей среды и
влиянием сил тяжести звеньев машины.
Момент
двигателя, приложенный к входному звену, при Q=0 называется момент
холостого хода (Мх.х.).
Таким образом, момент на входном звене (М) имеет две составляющих первая это
момент холостого хода (Мх.х.),
вторая – момент, обусловленный силой полезного сопротивления (МQ) т.е.
![]()
Значения работ за полное время установившегося
движения машины пропорциональны средним значениям мощностей за тот же период
времени. Отношение работ в формуле (1) можно заменить отношением мощностей
![]()
Или
![]()
где
М1
и М2 – соответственно,
моменты сил на входном и выходном звеньях; ![]() и
и ![]() – угловые
скорости входного и выходного звеньев; u12 -
передаточное отношение механизма;
– угловые
скорости входного и выходного звеньев; u12 -
передаточное отношение механизма; ![]() - силовое передаточное отношение
механизма как отношение момента сил (силы) на выходном звене к моменту сил
(силе) на входном звене.
- силовое передаточное отношение
механизма как отношение момента сил (силы) на выходном звене к моменту сил
(силе) на входном звене.
Зависимость (3) удобно использовать для аналитического
определения к.п.д. Для большинства механизмов получены формулы для определения
к.п.д. Однако, отклонения в качестве обработки поверхностей деталей, в
термической обработке материалов, в условиях смазки дают ряд дополнительных
факторов, учесть влияние которых на величину сил трения и к.п.д. при
аналитических расчетах не всегда представляется возможным. Поэтому весьма важно
уметь определить к.п.д. механизмов экспериментально.
Оборудование
Установка для определения к.п.д. винтовых пар ТММ-33 имеет основные
технические данные:
1. На установке определяются к.п.д. для винтовых пар:
№1 – резьба М 42х4,5. Наружный диаметр резьбы d=42 мм, шаг резьбы Р=4,5 мм, резьба однозаходная n=1, где n – число
заходов резьбы;
№2 – резьба прямоугольная Прям. 42 (3х8). Наружный
диаметр резьбы d=42 мм, шаг резьбы Р=8 мм, резьба
трехзаходная n=3.
2. Материал винтов – сталь 45. Материал гаек –
вкладышей – бронза ОЦС 5-5.
3. Вращение винтов от электродвигателя реверсивное,
полуавтоматическое – с угловой скоростью 60 1/с.
4. Рабочий ход гайки вдоль оси винта –
5. Осевая нагрузка от 20 до 100Н.
6. Максимальный момент на выходном валу редуктора –
100 Нм.
7. Потребляемая мощность электродвигателя – 50 Вт.
8. Питание от сети переменного тока – 110 –127В, 50Гц.
9. Габариты – 175х200х1440 мм.
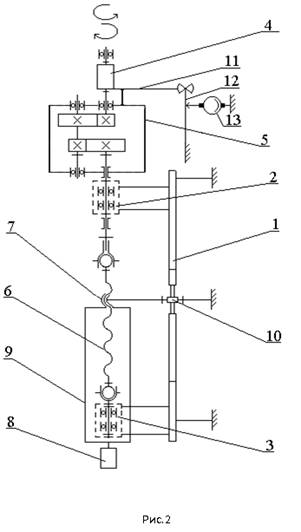
Установка показана на рис.1, её принципиальная схема -
на рис 2. Основанием установки является станина 1 из швеллера. На станине в
стойках 2 и 3 закреплены подшипники. В подшипнике верхней стойки 2 установлены
с возможностью свободного вращения статора двигателя 4 и редуктор 5. Статор
электродвигателя 4 жестко связан с корпусом редуктора 5. В подшипниках стоек 2
и 3 установлен винт 6, который связан с выходным валом редуктора 5. С винтом
взаимодействует посредством резьбы гайка 7. Груз 8 устанавливается на подвеске
9, прикрепленной к гайке 7. На крышке редуктора 5 закреплен жесткий рычаг 11,
снабженный точечными упорами, через которые он взаимодействует с пластинчатой
пружиной 12. С пружиной взаимодействует индикатор часового типа 13. От поворота
гайка 7 удерживается пальцем 10, входящим в паз стойки 1.
Жестко связанная система – корпус двигателя (статор),
корпус редуктора – не закреплена на станине а может свободно вращаться в
подшипнике верхней стойки 2. При включении двигателя ротор через редуктор
начинает вращать винт 6 и перемещать гайку 7 с грузом 8. При работе установки
(при вращении винта) статор двигателя стремится повернуться в направлении
противоположном вращению ротора. При этом прикрепленный к статору жесткий рычаг
11 деформирует пластинчатую пружину 12. Индикатор 13, имея силовое замыкание с
пружиной, показывает величину прогиба пружины от воздействия реактивного
момента равного моменту на винте 7. Рабочий цикл (ход гайки вверх и перемещение
вниз в исходное положение), включение и выключение двигателя совершаются
нажатием специальной кнопки 14 при подключенном с помощью тумблера 15
электропитании. Кнопка и тумблер помещены на специальном щитке установки вверху
справа (рис.1). При движении гайки вверх механизм работает в тяговом режиме, в
течение которого необходимо снять показания индикатора 13.
К.п.д. винтовой пары определяется при различных осевых
нагрузках, создаваемых набором грузов. Момент на винте определяется с помощью
тарировочного графика.
Порядок выполнения работы
1. Составить схему установки. Записать исходные
данные: вид резьбы, шаг резьбы, число заходов резьбы, материал винта, материалы
гаек.
2. Тумблером подключить питание.
3. При Q=0 нажатием на кнопку «Пуск» включить двигатель. За
время движения гайки вверх два - три раза снять отсчеты по шкале индикатора и
занести их в таблицу. Эти показания индикатора используются для определения
момента холостого хода Мх.х.
на винте.
4. Установить величину силы полезного сопротивления Q разновесками
весом от 5 до 50 Н. Для каждого значения силы Q нажатием кнопки «Пуск» включать двигатель на цикл
работы и при движении гайки вверх снять отсчеты по шкале индикатора.
5. Вычислить средние показания стрелки индикатора для
каждого значения силы полезного сопротивления. По тарировочному
графику определить моменты на винте (моменты на входном звене).
6. Определить работу движущих сил за один оборот винта
![]()
где М –
значение крутящего момента на винте.
7. Вычислить полезную работу за один оборот винта
![]()
где Q – величина
силы полезного сопротивления (осевая нагрузка); Ph – ход гайки за один оборот винта.
![]()
8. Определить значения к.п.д. для различных значений
силы полезного сопротивления по формуле:
![]()
9. Определить момент на винте МQ без учета
момента холостого хода Мх.х..
Рассчитать уточненные значения к.п.д. винтовой пары. Результаты расчетов
занести в таблицу. По уточненным значениям найти средний
к.п.д.
|
Осевая нагрузка Q |
Показания индикатора |
Момент на винте М |
|
Апс=Ph Q |
|
Момент на винте без учета Мх.х. МQ=М-Мх.х. |
|
|
|||
|
m1 |
m2 |
mcр |
|||||||||
|
Н |
мм |
мм |
мм |
Нмм |
Нмм |
Нмм |
|
Нмм |
Нмм |
|
|
|
Q=0 Q1 Q2 ... |
|
|
|
Мхх= |
>0 |
0 |
0 |
___ |
___ |
___ |
|
|
|
|
|
|||||||||
10. Получить аналитическую зависимость для определения
к.п.д. винтовой пары, используя формулу ![]() . Для этого найти ее кинематическое и силовое передаточное
отношение. Выполняется под руководством преподавателя.
. Для этого найти ее кинематическое и силовое передаточное
отношение. Выполняется под руководством преподавателя.
При расчете считать, что коэффициент трения скольжения
в винтовой паре f=0,12. Приведенный угол трения вычисляется по формуле:
где ![]() - угол при вершине резьбы, для метрической
резьбы
- угол при вершине резьбы, для метрической
резьбы ![]() , для прямоугольной
, для прямоугольной ![]() .
.
Угол подъема резьбы определить по формуле:
![]()
где d2 –
средний диаметр резьбы.
Для
метрической резьбы: ![]() а H=0,866025P.
а H=0,866025P.
Для
прямоугольной резьбы: ![]() ,
а H=0,5P.
,
а H=0,5P.
Рис.3.
Развертки однозаходного (слева) и трехзаходного
(n=3) винтов
На рис.3 показана развертка винта, используемая для
определения угла подъема резьбы. На рис.4 приведена информация о основных видах резьб.
11. По аналитической формуле рассчитать к.п.д.
винтовой пары и результаты сопоставить с экспериментальными.
12. Нарисовать структурную схему машинного агрегата
установки ТММ-33 и найти его средний к.п.д. считая, что средний к.п.д.
двигателя равен 90%, а к.п.д. редуктора = 85%.
Рис.4. Основные виды резьб
Контрольные вопросы
1. Как связаны к.п.д. и
коэффициент потерь?
2. Из чего складывается работа сил вредного
сопротивления?
3. Что такое средний
(цикловой) к.п.д.?
4. Чем отличается средний
(цикловой) от мгновенного к.п.д.?
5. Что такое силовое передаточное отношение механизма?
6. Как определить мгновенный к.п.д.?
7. В чем особенность работы механизма в тяговом режиме
и в режиме оттормаживания?
8. Какие механизмы могут работать в режиме оттормаживания?
9. В каких единицах измеряется коэффициент сухого
трения и коэффициент трения качения?
10. Как определяется к.п.д. машинного агрегата при
последовательном соединении механизмов?
11. Как определяется к.п.д. машинного агрегата при
параллельном соединении механизмов?
12. Чем отличается сухое трение от жидкостного
(вязкого)?
13. Как определить ход гайки на один оборот винта?
14. Как определить наружный диаметр винта и шаг резьбы
по ее условному обозначению?
15. Как определить угол подъема резьбы винта и гайки.
16. Какие виды резьб используются в винтовых
передачах?
email: KarimovI@rambler.ru
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Теоретическая механика Сопротивление материалов
Прикладная механика Детали машин Строительная механика