Главная
Лабораторная работа №4
Cтруктурный анализ плоских механизмов
Цель работы: изучение принципов структурного построения и анализа
механизмов.
1.
Теоретическое обоснование
Приступая к анализу
существующего или синтезу нового механизма, необходимо прежде всего
определиться с его структурой, то есть составить кинематическую схему,
подсчитать количество подвижных звеньев определить характер их соединения друг
с другой, уяснить метод образования механизма и чётко представить себе схему
передачи движения от ведущих звеньев к ведомым.
1.1. Механизмом называется искусственно созданная система,
предназначенная для преобразования движения одного или нескольких тел в
требуемые движения других тел (звеньев). Определенность движения звеньев в механизме обеспечивается тем, что
они, соединяясь между собой кинематическими парами, образуют кинематические
цепи.
1.2. Звеном называется деталь или несколько неподвижно соединенных друг
с другом деталей, которые движутся как одно целое. В Приложении 1 показаны условные изображения различных звеньев
механизма и их названия.
1.3. Кинематической парой называют соединение
двух соприкасающихся звеньев, допускающее их относительное движение. При этом
число возможных независимых движений H одного
звена относительно другого называют числом
подвижностей кинематической пары, а ограничения, наложенные на
относительное движение звеньев в кинематической паре – условиями связи. Условные изображения наиболее распространенных
кинематических пар даны в Табл.1.
1.4.
Кинематические пары классифицируются
по следующим признакам:
а)
по числу степеней свободы H звена кинематической пары в относительном движении
выделяют одноподвижные, двухподвижные,
трехподвижные, четырехподвижные и пятиподвижиые. Подвижность кинематической
пары определяется зависимостью H=6-S, где 6 –
максимальное число возможных движений твердого тела в пространстве: трех
поступательных по осям и трех вращательных вокруг осей координат XYZ; S – число условий связи, наложенных
кинематической парой на относительное движение каждого звена.
б)
по характеру соприкосновения звеньев кинематические пары различаются на низшие и высшие.
Таблица 1
|
№ п/п |
Условное изображение кинематических пар |
Возможные виды относительного движения |
Название кинематической
пары |
|
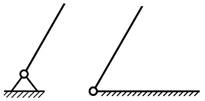
1 |
|
В |
Вращательная пара с одним
неподвижным звеном |
|
2 |
|
В |
Вращательная пара с двумя
подвижными звеньями |
|
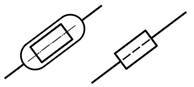
3 |
|
П |
Поступательная пара с
одним неподвижным звеном |
|
4 |
|
П |
Поступательная пара с
двумя подвижными звеньями |
|
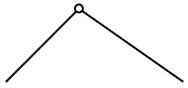
5 |
|
В |
Звено в различных
вариантах, входящее одновременно в состав двух или трех одноподвижных вращательных пар |
|
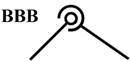
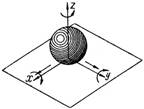
6 |
|
ВВВ |
Трехподвижная пара –
сферический шарнир |
|
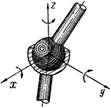
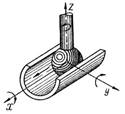
7 |
|
ВВ |
Двухподвижная пара –
сферический шарнир с пальцем |
Пояснения: В
– вращательное относительное движение; П
– поступательное относительное движение.
в) по характеру относительного движения звеньев
одноподвижные кинематические пары подразделяются на вращательные – В, поступательные
– П и винтовые.
Низшими
парами называются такие пары, в
которых соприкосновение элементов происходит по поверхности. Например,
одноподвижные поступательная и вращательная пары, а также двухподвижная
цилиндрическая и трехподвижная сферическая.
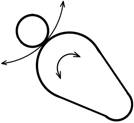
Высшими называются такие кинематические пары, у которых
соприкосновение элементов пары происходит по линии или в точке. Например,
кулачок и ролик толкателя кулачкового механизма (рис.1,а) и зубья зубчатых колес (рис.1, б).
В Приложении 2 представлены примеры различных кинематических пар.
Возможные независимые движения показаны стрелками и буквенными сочетаниями.
а) б)
Рис.1. Высшие
плоские двухподвижные кинематические пары.
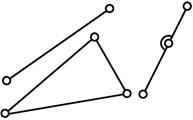
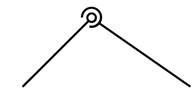
1.5. Кинематической цепью
называют систему звеньев, соединенных между собой кинематическими парами.
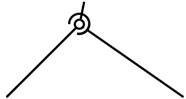
Кинематические цепи бывают замкнутыми
(рис.2) и открытыми (рис.3), простыми
и сложными, а по виду траекторий движения
точек звеньев разделяются на плоские
и пространственные. Наибольшее
распространение на практике имеют плоские кинематические цепи.
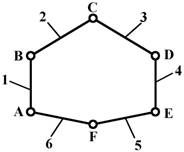
Рис.2. Простая плоская кинематическая цепь
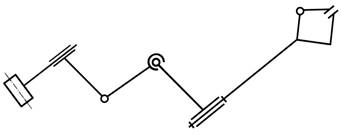
Рис.3. Простая пространственная кинематическая цепь
манипулятора
Плоской называется кинематическая
цепь, если точки ее звеньев описывают траектории, лежащие в параллельных
плоскостях, то есть их траекториями являются плоские кривые. Естественно если
точки звеньев описывают
пространственные кривые, то такие кинематические цепи (как и кинематические пары) называются пространственными.
Сложной называется кинематическая цепь, в
которой имеется хотя бы одно звено, входящее более чем в две кинематические
пары. Пример такой цепи дан на рис.4, д и
рис.9.
1.6. Степенью подвижности кинематической цепи W называют число степеней свободы
кинематической цепи относительно стойки – звена, принятого за неподвижное. Для плоских
механизмов применяется формула Чебышева
![]()
где n - число
подвижных звеньев кинематической цепи; p1 – число одноподвижных кинематических пар; р2 – число двухподвижных
кинематических пар.
В
пространственных кинематических цепях степень подвижности определяется по
формуле Малышева
![]()
Здесь р3 – число трехподвижных кинематических
пар; р4 – число четырехподвижных кинематических
пар; р5 – число
пятиподвижных кинематических пар.
Плоские
кинематические цепи с нулевой степенью подвижности называются группами Ассура. Это такие группы звеньев,
которые при соединении свободными кинематическими парами со стойкой превращаются в ферму. Группы Ассура имеют только одноподвижные кинематические пары, р2=0. Тогда степень
подвижности выразится
![]()
откуда р1 = 3/2 n.
Возможное
число звеньев и кинематических пар в группах Ассура приведено в Табл.2.
Таблица 2
|
Число звеньев n |
2 |
4 |
6 |
8 |
и т.д. |
|
Число кинематических пар |
3 |
6 |
9 |
12 |
и т.д. |
|
Класс старшего контура |
II |
III, IV |
IV, V |
V, VI |
и т.д. |
1.7. Группы Ассура делятся по классификации И.И.
Артоболевского на классы, порядки и виды. Класс группы задается
наивысшим замкнутым контуром, входящим в
ее состав. Класс же контура определяется числом внутренних кинематических пар, образующих этот замкнутый контур.
Можно сказать, что:
а) в группу Ассура II-го класса входит прямолинейный
контур (табл.3);
б) в группу Ассура III-го класса – трехсторонний
контур ABC (рис.4,б);
в) в группу Ассура IV-го класса – четырехсторонний подвижный контур BCDE.
Таблица 3
|
Классы
контуров |
||||
|
II |
III |
III |
IV |
V |
|
|
|
|
|
|



Модификации групп Ассура II, III, IV классов
представлены на рис.4.
|
а) |
б) |
в) |
|
|
г) |
д) |
||
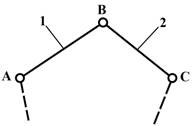
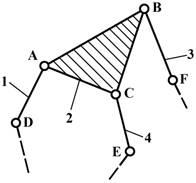
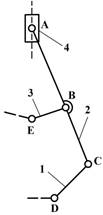
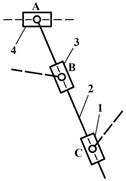
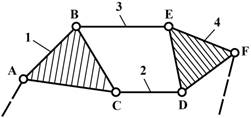
Рис.4. Группы Ассура: а) II-го класса; б) в) г)III-го класса;
д) IV-го класса
Группы Ассура II класса
содержат два звена и три кинематических пары. Разновидности групп Ассура II класса изображены на рис.5:
вид 1 – все кинематические пары вращательные;
вид 2 – одна крайняя кинематическая пара –
поступательная, а все остальные – вращательные;
вид 3 – звенья соединены между собой поступательной
кинематической парой, а крайние пары являются вращательными;
вид 4 – звенья соединены вращательной парой, а обе
крайние кинематические пары – поступательные;
вид 5 – одна крайняя кинематическая пара – вращательная;
все остальные – поступательные.
|
Вид 1
|
Вид 2
|
Вид3
|
|
|
Вид 5
|
|||
|
Вид 4
|
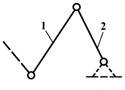
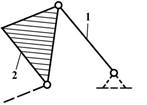
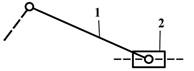
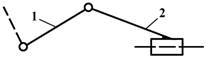
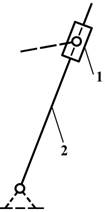
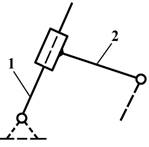
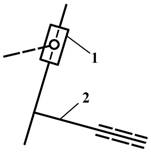
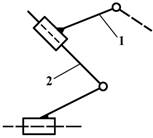

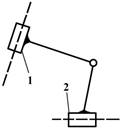
Рис. 5.
Группы Ассура II -го класса различных видов.
Порядок группы Ассура определяется количеством
кинематических пар, которыми она присоединяется к другим звеньям, т.е. числом
ее внешних (свободных) пар.
В группе Ассура на Рис.4-б
звено 2, называемое базисным, входит
в три внутренние кинематические пары со звеньями 1,3 и 4. Звенья 1,3,4
называются поводками и своими внешними кинематическими парами присоединяются к
другим звеньям механизма. Эта группа называется трехповодковой, или группой Ассура III класса III порядка.
Лишние
степени свободы и пассивные связи
При определении степени подвижности механизма необходимо
учитывать наличие лишних степеней свободы
и пассивных связей, которые не влияют
на характер движения механизма в целом.
Звенья, вносящие пассивные связи, уменьшают степень
подвижности механизма, поэтому при определении степени подвижности эти звенья не
учитываются.
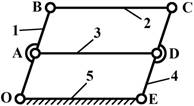
Рис. 6
На рис.6 изображен четырехзвенный механизм, у которого
звено 3 вносит пассивные связи. Степень подвижности механизма с учетом
пассивных связей составляет
![]()
Очевидно, что звено 3 введено конструктивно для
увеличения жесткости звеньев 1 и 4. Поэтому без учета пассивной связи имеем:
![]()
Следовательно, данный механизм имеет степень
подвижности W=1. В кулачковом
механизме с роликовым толкателем (рис. 1,а) степень подвижности получается
![]()
Здесь наблюдается лишняя степень свободы,
представляющая собой дополнительную подвижность ролика относительно толкателя.
Она не сказывается на степени подвижности кулачкового механизма и W=l.
Принцип
образования механизмов
При изучении механизмов их представляют на чертеже в
виде структурной или кинематической схем.
Структурной
схемой механизма называется
графическое изображение механизма с применением условных обозначений звеньев и
кинематических пар. Кинематическая схема
изображается в масштабе с указанием размеров, необходимых для кинематического
расчета механизма. Звенья нумеруются арабскими
цифрами в порядке их присоединения к входному
звену. Кинематические пары обозначаются заглавными
латинскими буквами в последовательности присоединения звеньев.
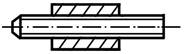
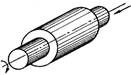
Входным
звеном механизма называется такое
звено, закон движения которого задан. Во всяком плоском механизме имеется одно
или несколько входных звеньев в виде кривошипа или ползуна (рис.7,а, б). Количество входных звеньев
определяется степенью подвижности механизма.
а)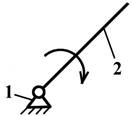 б)
б)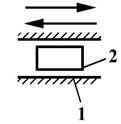
Рис.7
Группа звеньев, состоящая из входного звена и стойки,
называется начальным механизмом или механизмом I-го класса. Начальный
механизм обладает одной степенью подвижности и дальнейшее наслоение кинематических
цепей не должно изменять степени подвижности всего механизма.
Основной
принцип образования механизмов,
предложенный Л.В. Ассуром, заключается в следующем: любой механизм может быть
образован путем последовательного присоединения кинематических цепей с нулевой
степенью подвижности сначала к входному звену и к стойке, а затем и к любым
другим звеньям. И, наоборот, плоский механизм всегда можно разделить на
механизм I-го класса и группы Ассура.
Рассмотреть строение
механизма – это значит установить, из каких структурных групп состоит
данный механизм, и в какой последовательности они присоединены друг к другу.
Для выявления класса механизма необходимо расчленить его на группы Ассура,
начиная отсоединение с наиболее удаленных от входного звена. При этом степень
подвижности оставшейся части механизма не должна изменяться. Класс всего
механизма определяется по наивысшему
классу группы Ассура, входящей в механизм.
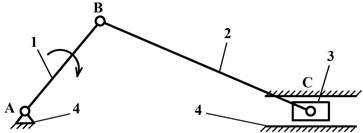
Рис. 8
Строение механизма можно записать в виде структурной формулы, которая указывает
состав и последовательность присоединения групп Ассура. Например, для механизма
на рис.8, образованного путем присоединения к начальному механизму I-го класса группы Ассура II-го класса, II-го
порядка, 2-го вида, структурная формула имеет вид:
![]()
где в числителе перечислены звенья, а в знаменателе
указаны кинематические пары, входящие в группы звеньев:
I –
начальный механизм первого класса;
II – группа Ассура второго
класса.
Здесь ВА(1,4),
ВВ(2,1), ВС(3,2) – индекс вращательных
кинематических пар в точках, обозначенных на схеме, с указанием соединяемых
звеньев;
ПС(3,4) – индекс поступательной кинематической пары, позволяющей
поступательное относительное движение звеньев.
Данный механизм II класса, так как самый высокий класс группы Ассура –
второй.
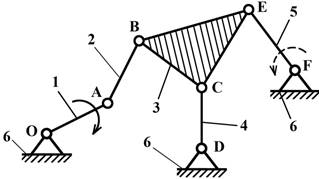
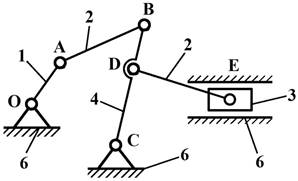
Рис.9
Класс и порядок механизма в некоторых случаях может меняться в зависимости от того,
какое звено принято в качестве входного. Если для шестизвенного механизма
(рис.9) принять за входное звено 5 (возможно и 4), то весь механизм будет II класса, так
как структурная формула имеет вид
![]()
а если принять за входное звено I, то невозможно
выделить группу звеньев II класса и механизм разбивается на начальный механизм
I класса и группу Ассура III класса. Структурная формула выглядит так
![]()
Рассмотренное строение плоских механизмов может быть
распространено на механизмы, в составе которых имеются и высшие кинематические
пары. Для этого каждая пара заменяется кинематической цепью, в состав которой
входят только одноподвижные кинематические пары (шарниры и ползуны).
Целью структурного анализа механизмов является определение степени подвижности и
его расчленение на группы Ассура.
Замена высших
кинематических пар
В тех случаях, когда в механизм
входят как высшие, так и низшие кинематические пары, для структурного анализа
выполняют замену высших пар кинематической цепью, состоящей из звеньев,
входящих только в пары 5-го класса. Одну высшую пару в простейшем случае можно
заменить одним звеном, входящим в две низшие пары, расположенные в центрах
кривизны профилей, образующих высшую пару. В результате такой замены будут
выполнены следующие условия:
во-первых, сохранится
прежняя степень подвижности механизма, в котором произведена замена;
во-вторых, характер
относительного мгновенного движения звеньев не изменится.
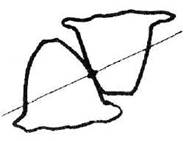
Чтобы заменяющий механизм был кинематически
эквивалентным заменяемому, необходимо при замене придерживаться определенных
правил, которые заключаются в следующем: если высшая пара представляет касание
профилей 1 и 2 (рис.10), то в точке контакта В
надо провести нормаль n-n к
профилям. На этой линии найти центры кривизны профилей и установить в них
шарниры D и Е, соединив их жестким фиктивным
звеном 3. Соединяя шарниры D
и Е с центрами А и С получим заменяющий механизм – шарнирный
четырехзвенник ADEC.
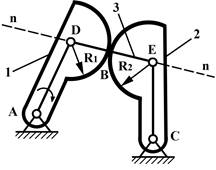
Рис.10
В случае, если один из профилей высшей пары будет
прямой линией, центр кривизны его будет удален в бесконечность и фиктивное
звено будет входить в одну вращательную и одну поступательную пару. Такая
замена показана на рис.11.
|
|
|
|
а) заменяемый механизм |
б) заменяющий механизм |
|
Рис.11 |
|
Заменяющие механизмы строятся для структурного и
кинематического исследования.
Рассмотрим несколько
примеров замены высших пар.
Пример 1. На
рис.12, а показан механизм, в котором
звенья 1 и 2 образуют высшую пару. Для замены этой кинематической пары проводим
общую нормаль в точке касания звеньев и находим центры кривизны, помещаем в них
вращательные пары А
и В 5-го класса и соединяем их прямой
АВ (![]() и
и ![]() – радиусы кривизны
профилей). Заменяющий механизм представлен на рис.12, б.
– радиусы кривизны
профилей). Заменяющий механизм представлен на рис.12, б.
Для основного механизма
(рис.12, а) степень подвижности
определяется по формуле Чебышева:
![]()
Для заменяющего механизма (рис.1.7, б) степень
подвижности равна:
![]()
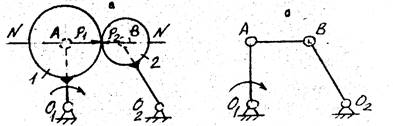
Рис. 12
Пример 2. Рассмотрим механизм, изображенный на рис.13, а. Здесь![]()
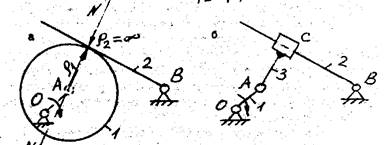
Рис. 13. а) основной механизм; б) заменяющий механизм
Этот механизм можно
заменить другим рис.13, б, включающим
только низшие кинематические пары. Степень подвижности заменяющего механизма ![]() . Заменяющий механизм, обладая той же степенью
подвижности, что и основной, не изменяет характера мгновенного относительного
движения звеньев.
. Заменяющий механизм, обладая той же степенью
подвижности, что и основной, не изменяет характера мгновенного относительного
движения звеньев.
2.
Последовательность выполнения работы
Содержание работы. Студент должен рассмотреть два
механизма, при этом следует определить число звеньев и кинематических пар,
изобразить структурную схему
механизма и составить структурную формулу.
Оборудование:
для студентов всех специальностей механизм с низшими кинематическими парами, а
для механиков, дополнительно, механизм с высшей кинематической парой.
Инструменты:
линейка, треугольник, циркуль и транспортир.
Порядок
структурного анализа механизмов
1. Ознакомиться с принципом действия механизма и
установить его назначение (Например: преобразовать вращательное движение в
поступательное).
2. Определить: какие из звеньев являются кривошипом,
шатуном, ползуном, кулисой, коромыслом. Наименование звеньев записать в таблицу
основных результатов.
3. Вычертить одно из положений механизма в виде
структурной схемы, при котором достаточно
наглядно видны все звенья (не
будет наложения одного звена на другое). Указать стрелкой направление вращения входного звена – кривошипа.
4. Пронумеровать звенья арабскими цифрами в порядке их присоединения к кривошипу
(1,2,3 и т.д.).
5. Обозначить кинематические пары заглавными латинскими буквами в последовательности
присоединения звеньев.
6. Определить:
а)
число подвижных
звеньев (n);
б)
тип
кинематических пар (В - вращательная,
П- поступательная);
в)
количество одноподвижных (р1) и двухподвижных
(р2) кинематических пар;
г)
степень подвижности
W механизма;
д)
наличие пассивных
связей и лишних степеней свободы; результаты занести в таблицу.
7. Расчленить механизм на структурные группы Ассура и
начальный механизм.
8. Вычертить структурные группы Ассура и начальный
механизм с правильным обозначением кинематических пар и звеньев механизма,
начиная с наиболее удаленной группы.
9. Определить для каждой группы Ассура: класс, вид,
степень подвижности и составить структурную формулу механизма.
10. Определить степень подвижности начального механизма
и составить структурную формулу.
11. Составить структурную формулу для механизма в целом.
12. Определить класс всего механизма.
13. Показать на схеме расстояния в мм между неподвижными
элементами кинематических пар (базовыми точками на стойке), приняв за начало системы
координат центр вращения кривошипа. Определить все размеры между центрами
шарниров и результаты записать в таблицу.
14. Подписать и защитить отчет по лабораторной работе.
Форма
отчета
"структурный анализ и классификация плоских механизмов"
Студент Группа Руководитель
Цель: Изучение принципов строения и структурного анализа
механизмов.
Оборудование:
II. Модель механизма с высшей кинематической парой.
Инструменты: Линейка, треугольник, циркуль, транспортир.
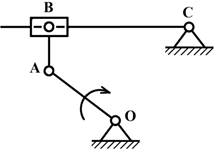
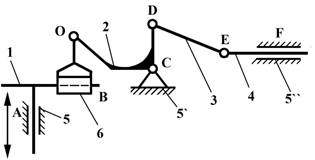
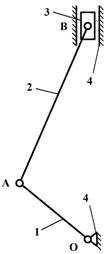
I. АНАЛИЗ РЫЧАЖНОГО
ШЕСТИЗВЕННИКА
1) Структурная схема.
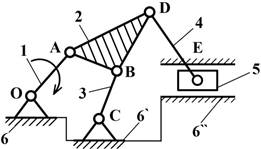
Назначение
механизма: преобразовать вращательное
движение кривошипа в поступательное движение ползуна с усложненным законом
движения.
2) Звенья механизма.
|
Номер
звена |
Наименование |
Подвижность
звеньев |
Число
подвижных звеньев |
|
1 |
Кривошип |
подвижное |
n=5 |
|
2 |
Шатун |
–
« » – |
|
|
3 |
Коромысло |
–
« » – |
|
|
4 |
Шатун |
–
« » – |
|
|
5 |
Ползун |
подвижное |
|
|
6 |
Стойка |
неподвижное |
3) Кинематические пары
|
Обоз- наче- ние |
Соеди- няемые элементы |
Тип
пары |
Индекс пары |
Число
пар |
|||
|
Вид движения |
Характер соединения |
Подвижность |
одноподвижных |
двухподвижных |
|||
|
O A B C D E E |
1,6 2,1 3,2 3,6 4,2 5,4 5,6 |
вращат. –
« » – –
« » – –
« » – –
« » – вращат. поступ. |
Низшая –
« » – –
« » – –
« » – –
« » – –
« » – Низшая |
Одноподвижн –
« » – –
« » – –
« » – –
« » – –
« » – Одноподвижн |
В(1,6) В(2,1) В(3,2) В(3,6) В(4,2) В(5,4) П(5,6) |
p1=7 |
p2=0 |
4) Определение степени подвижности механизма
![]()
Лишних
степеней свободы и пассивных связей нет.
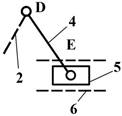
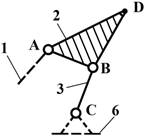
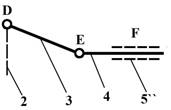
5) Строение групп Ассура.
|
а)
|
Последняя группа Ассура II
класса, II порядка, 2-го вида
Структурная формула:
|
|
б)
|
Предпоследняя группа Ассура II
класса, II порядка, 1-го вида
Структурная формула:
|
|
в)
|
Начальный механизм I класса
Структурная формула:
|

6) Структурная формула всего механизма:
![]()
Данный механизм II класса,
так как самый высокий класс группы Ассура – второй.
Работу
выполнил________________
Отчет
принял__________________
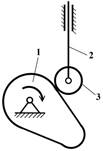
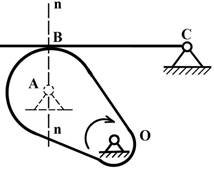
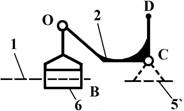
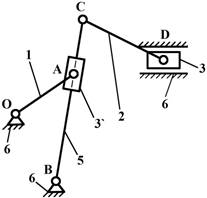
II. МЕХАНИЗМ С ВЫСШЕЙ КИНЕМАТИЧЕСКОЙ ПАРОЙ.
1) На схеме
приведен механизм приемника давления электрического дистанционного манометра.
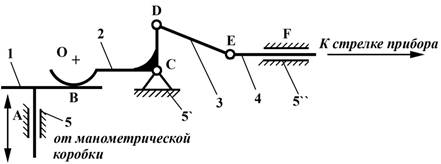
2) Звенья механизма.
|
Номер
звена |
Наименование |
Подвижность
звеньев |
Число подвижных звеньев |
|
1 |
Ползун |
подвижное |
n=4 |
|
2 |
Коромысло |
–
« » – |
|
|
3 |
Шатун |
–
« » – |
|
|
4 |
Шток |
подвижное |
|
|
5 |
Стойка |
неподвижное |
3) Кинематические пары
|
Обозначение |
Соединяемые элементы |
Тип
пары |
Индекс пары |
Число
пар |
|||
|
Вид движения |
Характер соединения |
Подвижность |
одноподвижных |
двухподвижных |
|||
|
A B C D E F |
1,5 1,2 5,2 2,3 3,4 4,5 |
поступ. вращат.
вращат. вращат. вращат. поступ. |
Низшая Высшая Низшая
Низшая Низшая
Низшая |
Одноподвижн Двухподвижн Одноподвижн Одноподвижн Одноподвижн
Одноподвижн |
П(1,5) В(1,2) В(5,2) В(2,3) В(3,4) П(4,5) |
p1=5 |
p2=1 |
4) Степень подвижности механизма.
![]()
5) Строим заменяющий механизм.
Здесь двухподвижная кинематическая пара в точке В заменена
двумя одноподвижными
в точках В и О путем введения жесткого фиктивного звена 6. Для
заменяющего механизма имеем n =5, p1 =7, р2=0 и получаем:
![]()
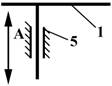
6) Группы Ассура.
|
а)
|
Последняя группа Ассура II класса, II порядка, 2 вида n=2, p1=3 и Структурная
формула:
|
|
б)
|
Предпоследняя группа Ассура II класса, II порядка, 2 вида n=2, p1=3 и Структурная
формула:
|
|
в)
|
Начальный механизм I-го класса Структурная формула:
|
7)
Структурная формула всего механизма:
![]()
Данный механизм II-го класса, т.к. наивысший класс
групп Ассура, входящих в состав механизма – второй.
Контрольные
вопросы
- Что такое механизм, звено, кинематическая пара,
кинематическая цепь, кинематическая схема, структурная схема?
- Последовательность структурного анализа механизма.
- Формула строения механизма.
- Основной принцип образования механимза.
- По каким признакам делятся кинематические пары на
классы и на виды: низшие, высшие?
- Дайте определение механизму, кинематической цепи.
- Чем отличаются плоские механизмы от
пространственных?
- Как влияют пассивные связи на степень подвижности
механизма?
- Какие звенья образуют механизм I-го класса?
- Как может быть образован механизм?
- Какие кинематические схемы называются группами Ассура (структурными группами)?
- Что характеризует число "степень подвижности
механизма"?
- Каков принцип построения новых механизмов?
- По каким признакам классифицируются механизмы?
- По каким признакам классифицируются группы Accypa?
- Как определить класс группы Ассура, ее порядок и
вид?
- Какие группы Ассура находят наибольшее
распространение?
- Как определить класс всего механизма?
- В какой последовательности механизм разбивается на
группы Ассура?
- Чему равна степень подвижности групп Ассура?
- Чему равна степень подвижности механизма I класса (ведущего звена со стойкой)?
- Какие группы являются группами второго, третьего, четвертого класса?
- Какие и сколько видов имеет группа Ассура второго класса?
- Как составляется структурная формула механизма?
- Приведите пример механизма с лишней степенью
свободы.
- Укатите возможные причины появления избыточных
связей.
- С какой целью производится замена высших пар кинематическими
цепями с низшими. парами?
- Укажите условия замены высших пар.
- Приведите пример замены высшей пары.
Библиографический список
1.
Фролов К.В., Попов С.А. и др. Теория механизмов
и механика машин – учебник для ВТУЗов. М., Высшая школа, 2003.
2.
Марченко С.И., Марченко Е.П., Логинова Н.В.
Теория механизмов и машин. Ростов н/Д, Феникс, 2003.
3.
Фролов К.В., Попов С.А., Мусатов А.К. и др.
Теория механизмов и машин. М., Высшая школа, 2001.
4.
Артоболевский И.И. Теория механизмов и
машин. М., Наука, 1988.
5.
Кореняко А.С. Курсовое проектирование по теории механизмов и машин. Киев, «ВИЩА
школа», 1976.
6.
Левицкая О.М., Левицкий М.И. Курс теории
механизмов и машин. М, Высшая школа, 1978.
7.
Артоболевский И.И., Эдельштейн Б.В.
Сборник задач по теории механизмов и машин. М, Наука, 1975.
8.
Иосилевич Г.Б. и др. Прикладная механика
– учебник для ВУЗов. М., Высшая школа, 1989.
Приложение 1. Условные
изображения и название звеньев механизма
|
|
|
|
Стойка – это неподвижное звено. В зависимости от
характера движения относительно стойки звенья называют:
- кривошипом (АО) – звено 1, которое образует
вращательную пару со стойкой и совершает полный оборот вокруг неподвижной оси.
- шатуном (AB,CD)
– звено 2 соединенное вращательными парами с подвижными звеньями, но не
связанное со стойкой 6;
- ползуном (B, D, E) – звено 3
шарнирно соединенное со звеном 2 и поступательно перемещающееся по неподвижным
направляющим;
- коромыслом (ВС) – звено 4, которое совершает
неполный оборот вокруг оси, связанной со стойкой;
- кулисой (ВС) – звено 5 вращающееся вокруг стойки 6,
которое является направляющей для кулисного камня;
- кулисным камнем (A) – звено 3`, образующее поступательную пару с
кулисой.
Приложение 2. Примеры
кинематических пар и комбинации
независимых движений
|
Тип пар |
Название |
Возможные
движения и условные обозначения |
Примеры
кинематических пар |
|
Плоские |
Одноподвижная,
низшая |
|
|
|
Двухподвижная высшая |
ВП |
|
|
|
Пространственные |
Винтовая
– одноподвижная, низшая |
|
|
|
Двухподвижная,
низшая – цилиндрическая |
|
|
|
|
Трехподвижная,
низшая – сферическая |
|
|
|
|
Четырехподвижная,
высшая – шар-цилиндр |
|
|
|
|
Пятиподвижная,
высшая – шар-плоскость |
|
|




Приложение 3. Основные понятия, определения и термины
МЕХАНИЗМ – система тел, созданная для преобразования
движения одного или нескольких твердых тел в требуемые движения других тел.
МАШИНА – устройство, выполняющее механические движения
для преобразования энергии, материалов и информации с целью замены или
облегчения физического и умственного труда.
ЗВЕНО – одна или несколько неподвижно соединенных друг
с другом деталей, входящих в механизм и движущихся, как одно целое.
КИНЕМАТИЧЕСКАЯ ПАРА – соединение двух звеньев,
допускающее их относительное движение. В плоских механизмах встречаются одноподвижные кинематические пары с
касанием звеньев по поверхности (низшие – вращательные и поступательные), а
также двухподвижные с касанием
звеньев в точке (высшие – в зубчатых зацеплениях и кулачковых механизмах).
ЭЛЕМЕНТ КИНЕМАТИЧЕСКОЙ ПАРЫ –совокупность
поверхностей, линий и точек звена, по которым оно может соприкасаться с другим
звеном, образуя кинематическую пару.
СТЕПЕНЬ ПОДВИЖНОСТИ КИНЕМАТИЧЕСКОЙ ПАРЫ – целое число,
показывающее сколько независимых
движений позволяет делать данная пара одному звену относительно другого. По степени подвижности пары делят на:
одноподвижные, двухподвижные, трехподвижные, четырехподвижные и пятиподвижные.
ОДНОПОДВИЖНАЯ ПАРА – кинематическая пара с одной
степенью свободы в относительном движении ее звеньев. Одноподвижными являются
поступательная, вращательная и винтовая пары.
ДВУХПОДВИЖНАЯ ПАРА – кинематическая пара с двумя
степенями свободы в относительном движении ее звеньев. Двухподвижными парами в
плоских механизмах считают все высшие пары (зуб+зуб
и кулачек+толкатель)
ВРАЩАТЕЛЬНАЯ ПАРА – одноподвижная пара, допускающая вращательное движение одного звена относительно
другого [см. кинематическая пара].
ПОСТУПАТЕЛЬНАЯ ПАРА – одноподвижная пара, допускающая прямолинейно-поступательное движение одного звена
относительно другого.
ПЛОСКИЙ МЕХАНИЗМ – механизм, точки звеньев которого
описывают траектории, лежащие в параллельных плоскостях.
ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ – механизм, точки звеньев
которого описывают пространственные траектории или траектории, лежащие в
пересекающихся плоскостях.
ШАРНИРНЫЙ МЕХАНИЗМ – механизм, звенья которого
образуют только вращательные пары. Примерами шарнирных механизмов являются кривошипно-коромысловый
механизм, двухкоромысловый механизм и др.
ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННЫЙ МЕХАНИЗМ (шарнирный
четырехзвенник) – шарнирный механизм, содержащий три подвижных звена и стойку.
РЫЧАЖНЫЙ МЕХАНИЗМ – механизм, звенья которого образуют
только вращательные, поступательные, цилиндрические и сферические пары.
Примерами рычажного механизма являются кривошипно-ползунный механизм, кулисный
механизм и др.
КРИВОШИПНО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ – шарнирный четырехзвенный механизм, в состав которого входят
кривошип и коромысло.
КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ – рычажный
четырехзвенный механизм, в состав которого входят кривошип и ползун.
Кривошипно-ползунный механизм служит для преобразования вращательного движения
кривошипа в возвратно-поступательное движение ползуна или, наоборот,
возвратно-поступательного движения ползуна во вращательное движение кривошипа.
КРИВОШИПНО-КУЛИСНЫЙ МЕХАНИЗМ – рычажный четырехзвенный
механизм, в состав которого входят кривошип и кулиса. Кривошипно-кулисный
механизм служит для передачи и преобразования вращательного движения кривошипа
во вращательное или качательное движение кулисы и, наоборот, движение кулисы во
вращение кривошипа.
СТОЙКА (редко:
корпус, рама, станина, основание) – звено, принимаемое за неподвижное.
КРИВОШИП (иногда:
коленчатый вал, коленвал, эксцентрик, водило) – вращающееся звено, которое
может совершать полный оборот вокруг неподвижной оси.
КОРОМЫСЛО (редко
рычаг) – вращающееся звено, которое может совершать только неполный оборот
вокруг неподвижной оси.
ПОЛЗУН (поршень – в двигателях и компрессорах,
толкатель – в кулачковых механизмах, суппорт – в станках, кулисный камень) –
звено образующее поступательную пару с другим звеном (чаще всего со стойкой).
КУЛИСА – звено, вращающееся вокруг неподвижной оси и
образующее с другим подвижным звеном поступательную пару.
ШАТУН – звено, образующее кинематические пары только с
подвижными звеньями.
ШАТУННАЯ КРИВАЯ – траектория, описываемая какой-либо
точкой шатуна.
ДВУХКРИВОШИПНЫЙ МЕХАНИЗМ – шарнирный четырехзвенный
механизм, в который входят два кривошипа. Двухкривошипный
механизм служит для передачи и преобразования вращательного движения. За один
оборот одного кривошипа другой кривошип совершает также один оборот.
Равномерному вращению одного кривошипа соответствует обычно неравномерное
вращение другого кривошипа.
ДВУХКОРОМЫСЛОВЫЙ МЕХАНИЗМ – шарнирный четырехзвенный
механизм, в состав которого входят два коромысла. Двухкоромысловый
механизм служит для преобразования качательного
движения одного коромысла в качательное движение другого
коромысла.
ВХОДНОЕ ЗВЕНО – звено, которому сообщается движение,
преобразуемое механизмом в требуемые движения других звеньев. Входное звено
соединено с двигателем либо с выходным звеном другого механизма.
ВЫХОДНОЕ ЗВЕНО – звено, совершающее движение, для
выполнения которого предназначен механизм. Выходное звено соединено с
исполнительным устройством (рабочим органом, указателем прибора), либо со входным звеном другого механизма.
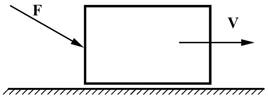
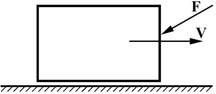
ВЕДУЩЕЕ
ЗВЕНО – звено, для которого сумма элементарных работ внешних сил, приложенных к
нему, положительна. Для вращающихся ведущих
звеньев (схема а) момент Т и угловая
скорость ![]() , а для поступательно движущегося ведущего звена проекция силы F на направление движения и линейная
скорость V (схема б) направлены в одну сторону.
, а для поступательно движущегося ведущего звена проекция силы F на направление движения и линейная
скорость V (схема б) направлены в одну сторону.
|
а)
|
б)
|

Обычно ведущее звено совпадает с входным звеном, но в
процессе движения одно и то же входное звено может быть ведущим или ведомым.
Например, поршень в двигателе внутреннего сгорания при сгорании смеси – ведущее
звено, но при всасывании и сжатии смеси, а также при выпуске отработанных газов
– ведомое звено.
ВЕДОМОЕ ЗВЕНО – звено, для которого сумма элементарных
работ внешних сил, приложенных к нему, отрицательна. Для вращающегося ведомого
звена (схема а) момент силы Т и угловая скорость ω, а для поступательно
движущегося звена (схема б) проекция силы F на направление движения ведомого
звена и линейная скорость V направлены в
противоположные стороны.
|
а)
|
б)
|

Обычно ведомое звено совпадает с
выходным звеном, но в процессе движения одно и то же выходное звено может быть
ведомым или ведущим, например, колесо электровоза при разгоне – ведомое звено,
а при замедлении на ровном участке – ведущее звено (двигатель, соединенный с
колесом через редуктор превращается в генератор и отдает энергию в сеть).
СТЕПЕНЬ ПОДВИЖНОСТИ МЕХАНИЗМА – целое число (W), показывающее
сколько независимых движений нужно подвести к механизму, чтобы на выходе
получить одно или наоборот. Большинство механизмов имеет степень подвижности W = 1; у дифференциальных механизмов W = 2; у роботов и манипуляторов W = 4 – 8 (чаще всего у них W = 4), также как и у основного
механизма экскаватора.
СИНТЕЗ МЕХАНИЗМОВ – проектирование схемы механизма по
заданным его свойствам. Синтез включает в себя выбор структурной схемы и
определение постоянных параметров выбранной схемы механизма по заданным его
свойствам. Различают: структурный синтез механизмов – выбор его схемы;
метрический синтез – нахождение размеров звеньев и динамический синтез –
распределение масс звеньев.
СИНТЕЗ МЕХАНИЗМОВ ПО ЧЕБЫШЕВУ – синтез механизмов по
методу наилучшего равномерного приближения функций.
email: KarimovI@rambler.ru
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Теоретическая механика Сопротивление материалов
Прикладная механика Детали машин Строительная механика