Главная
Синтез кулачковых механизмов
Исходные данные для исследуемых механизмов
Для
проектируемого кулачкового механизма заданы:
1)
Кинематическая схема и некоторые геометрические и кинематические параметры (табл.
1-3).
2)
Фазовые углы поворота кулачка (рис.1):
φуп - за время ускоренного подъема толкателя;
φрп - за время равномерного подъема;
φзп - за время замедленного подъема;
φвп - за время верхнего выстоя
толкателя;
φуо - за время ускоренного опускания толкателя;
φро - за время равномерного опускания;
φзо - за время замедленного опускания.
Фазы
равномерного движения как при подъеме, так и при
опускании толкателя могут отсутствовать; может также отсутствовать фаза
верхнего выстоя.
Рис.1
3)
Закон движения толкателя.
Закон движения толкателя - это периодическая
зависимость вида s=s(φ) для
механизмов по схемам а и в, или Ψ=Ψ(φ) – для механизмов по схеме б; здесь s и Ψ – линейное (или
соответственно угловое перемещение) толкателя из нижнего крайнего положения в
текущее, φ – угол поворота
кулачка за время этого перемещения.
Как
правило, законы движения толкателя задают не в виде функций s=s(φ) или Ψ=Ψ(φ), а в виде зависимостей
аналогов ускорений толкателя по углу поворота кулачка, т.е.
![]()
![]()
на
разных фазах движения эти законы могут быть разными.
Для
каждого конкретного варианта исходных данных консультант задает закон движения
толкателя в виде последовательности из четырех цифр - номеров ячеек табл. 5.
Пример: для механизма с коромысловым толкателем схемы б обозначение закона движения 1365 показывает,
что модуль аналога углового ускорения толкателя ![]() изменяется в течение цикла движения механизма
следующим образом:
изменяется в течение цикла движения механизма
следующим образом:
1
- при ускоренном подъеме ![]() = const;
= const;
3
- при замедленном подъеме ![]() линейно убывает;
линейно убывает;
6
- при ускоренном опускании ![]() изменяется по закону полуволны синусоиды;
изменяется по закону полуволны синусоиды;
5
- при замедленном опускании ![]() убывает по закону косинуса.
убывает по закону косинуса.
Содержание работы
1)
Рассчитать паpаметpы
диаграмм движения толкателя, вывести (если это необходимо для построения диаграмм)
их уравнения и вычеpтить диагpаммы;
2)
Выбpать паpаметpы,
необходимые для получения механизма наименьших pазмеpов
(линейные pазмеpы, выбираемые проектировщиком, окpуглить до кpатных 5 мм);
3)
Вычертить профиль кулачка;
4)
Вычертить диаграмму углов давления для механизма с роликовым толкателем или
диаграмму радиусов кривизны профиля кулачка для механизма с плоским толкателем.
Примечание. В задании по этому разделу исходные данные шифруются
в виде в - 3 - 08 - 2163, что
означает:
|
в |
- обозначение схемы
механизма; |
|
3 |
- вариант исходных
данных (табл. 1-3); |
|
08 |
- сочетание фазовых углов
(табл. 4); |
|
2163 |
- обозначение закона
движения (номера ячеек табл. 5). |
Схемы кулачковых механизмов и исходные данные
а) Механизм с движущимся
поступательно роликовым толкателем
При
построении профиля кулачка должны быть приняты во внимание заданные в таблице
направление угловой скорости ωк,
а также величина и направление эксцентриситета e; если величина e не
задана, проектировщик согласовывает ее выбор с выбором значения теоретического
минимального радиуса ![]() так, чтобы получить кулачок наименьших размеров.
так, чтобы получить кулачок наименьших размеров.
Примечание:
на схеме показаны положительные направления угловой скорости кулачка ωк и эксцентриситета
e.
Таблица 1
|
Наименование параметра |
Варианты исходных данных |
||||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
||
|
Ход
толкателя H, мм |
40 |
42 |
45 |
47 |
50 |
40 |
42 |
45 |
47 |
50 |
|
|
Эксцентриситет
e, мм |
10 |
-8 |
- |
0 |
- |
0 |
8 |
- |
-10 |
-8 |
|
|
Направление
вращения кулачка |
+ |
- |
+ |
- |
+ |
- |
+ |
- |
+ |
- |
|
|
Наибольшие углы давления,
градусы |
при
подъеме |
30 |
35 |
30 |
35 |
30 |
35 |
30 |
35 |
30 |
35 |
|
при
опускании |
40 |
45 |
40 |
45 |
40 |
45 |
40 |
45 |
40 |
45 |
|
б) Механизм с коромысловым роликовым толкателем
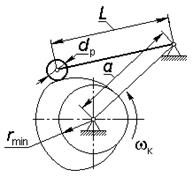
При
построении профиля кулачка считать заданным направление угловой скорости
кулачка ωк.
Длина
коромысла L задана, а межосевое
расстояние a и теоретический
минимальный радиус ![]() должны быть
определены из условия минимизации размеров механизма.
должны быть
определены из условия минимизации размеров механизма.
Примечание:
на схеме показано положительное направления угловой скорости кулачка.
Таблица 2
|
Наименование параметра |
Варианты исходных данных |
||||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
||
|
Ход
толкателя Ψ,
градусы |
28 |
32 |
36 |
28 |
32 |
36 |
28 |
32 |
36 |
30 |
|
|
Длина
коромысла L, мм |
115 |
130 |
125 |
120 |
130 |
125 |
130 |
125 |
120 |
130 |
|
|
Направление
вращения кулачка |
+ |
- |
+ |
- |
+ |
- |
+ |
- |
+ |
- |
|
|
Наибольшие углы давления,
градусы |
при
подъеме |
30 |
35 |
30 |
35 |
30 |
35 |
30 |
35 |
30 |
35 |
|
при
опускании |
40 |
45 |
40 |
45 |
40 |
45 |
40 |
45 |
40 |
45 |
|
в) Механизм с движущимся поступательно
плоским толкателем
При
построении профиля кулачка учесть
направление и величину эксцентриситета e, угла передачи γ, а также
направление угловой скорости ωк; если
значение e не задано, его нужно подобрать
так, чтобы точка Р крепления тарелки к штоку
располагалась примерно посередине ее рабочей длины.
Примечание:
на схеме показаны положительные направления угловой скорости кулачка ωк и эксцентриситета e.
Таблица
3
|
Наименование параметра |
Варианты исходных данных |
|||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
Ход толкателя H, мм |
40 |
42 |
45 |
47 |
50 |
40 |
42 |
45 |
47 |
50 |
|
Эксцентриситет e, мм |
10 |
- 8 |
- |
0 |
- |
8 |
-10 |
0 |
- |
- |
|
Угол передачи γ, градусы |
90 |
90 |
90 |
90 |
90 |
90 |
70 |
110 |
110 |
70 |
|
Направление вращения
кулачка |
+ |
- |
+ |
- |
+ |
- |
+ |
- |
+ |
- |
Таблица 4. Фазовые углы
поворота кулачка
|
№ вариантов |
φуп |
φрп |
φзп |
φвп |
φуо |
φро |
φзо |
|
01 |
80 |
30 |
60 |
30 |
70 |
20 |
50 |
|
02 |
60 |
30 |
80 |
30 |
60 |
20 |
50 |
|
03 |
80 |
30 |
80 |
30 |
40 |
20 |
50 |
|
04 |
80 |
20 |
70 |
20 |
70 |
30 |
50 |
|
05 |
70 |
20 |
80 |
20 |
50 |
30 |
70 |
|
06 |
80 |
20 |
80 |
20 |
55 |
20 |
65 |
|
07 |
90 |
30 |
50 |
30 |
65 |
20 |
55 |
|
08 |
50 |
30 |
90 |
30 |
50 |
30 |
60 |
|
09 |
90 |
30 |
90 |
30 |
40 |
15 |
45 |
|
10 |
90 |
20 |
50 |
20 |
65 |
15 |
50 |
|
11 |
50 |
20 |
90 |
20 |
70 |
20 |
50 |
|
12 |
90 |
20 |
90 |
20 |
60 |
20 |
40 |
|
13 |
80 |
0 |
60 |
20 |
40 |
20 |
60 |
|
14 |
60 |
0 |
80 |
30 |
45 |
20 |
55 |
|
15 |
80 |
0 |
80 |
40 |
50 |
20 |
60 |
|
16 |
80 |
0 |
70 |
20 |
60 |
20 |
50 |
|
17 |
70 |
0 |
80 |
30 |
60 |
0 |
60 |
|
18 |
80 |
0 |
80 |
40 |
70 |
0 |
50 |
|
19 |
90 |
0 |
50 |
20 |
50 |
0 |
70 |
|
20 |
50 |
0 |
90 |
30 |
65 |
0 |
55 |
|
21 |
90 |
0 |
90 |
40 |
55 |
0 |
65 |
|
22 |
90 |
0 |
50 |
20 |
50 |
30 |
50 |
|
23 |
50 |
0 |
90 |
30 |
50 |
20 |
50 |
|
24 |
90 |
0 |
90 |
40 |
50 |
0 |
50 |
|
25 |
80 |
30 |
60 |
20 |
50 |
20 |
70 |
Таблица 5. Законы изменения модуля
аналога ускорения ![]() (или
аналога углового ускорения
(или
аналога углового ускорения ![]() )
)
|
1 - Модуль ускорения постоянен
|
2 - Модуль ускорения линейно возрастает
|
|
3 - Модуль ускорения линейно убывает
|
4 - Модуль ускорения
возрастает по закону синуса
|
|
5 - Модуль ускорения
убывает по закону косинуса
|
6 - Модуль ускорения изменяется по закону полуволны
синусоиды
|
email: KarimovI@rambler.ru
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Теоретическая механика Сопротивление материалов
Прикладная механика Детали машин Строительная механика